{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
|
Function
|
|
|
| The functions of On-Board-Computer Subsystem are as follows. |
| Giving guidance for its destination to CarrierSat by using servo motor |
|
•Getting
sensor and GPS datas, and calculate its position
|
|
•Sending
downlink datas to Tx
|
|
•Writing
datas in memories
|
| On-Board-Computer |
|
|
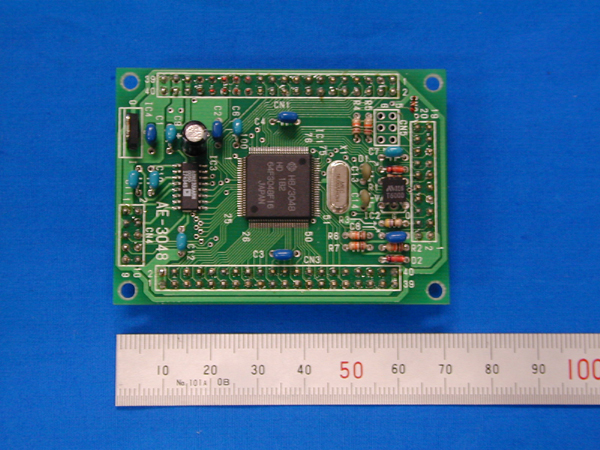
| •On-Board-Computer |
| The On-Board-Computer has Aki-H8 as main CPU. See followiings to get the spec and picture. |
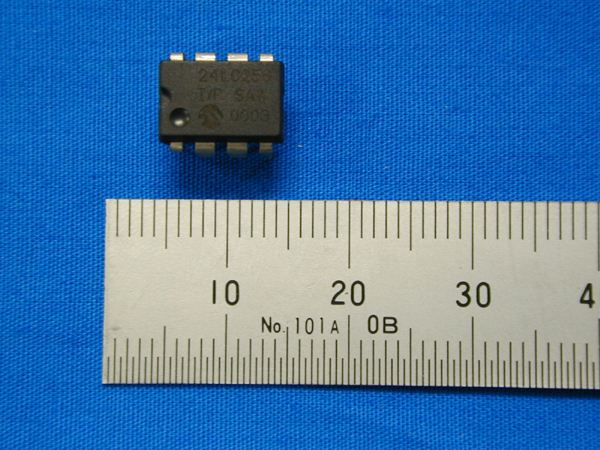
| •Memory |
| We'd used EEPROM 24LC256. See followings to get the spec and picture. |
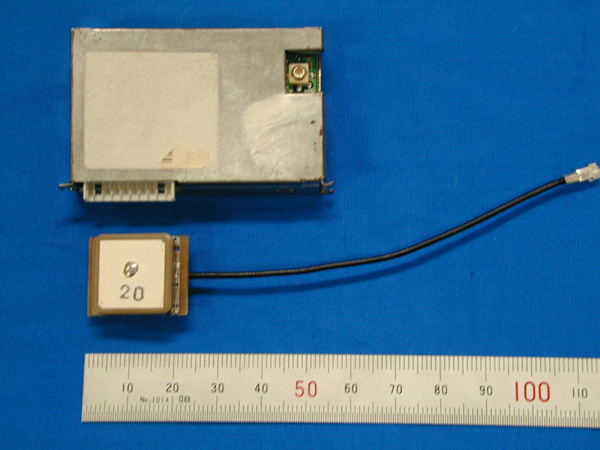
| •GPS |
|
We'd used GPS receiver made by Hurunodenki.We'd got GPSdata and used velocity-x,y,z, position-x,y,z, GPSTime, DOP-H,V, state of capturing satellite, the number of capturing satellite of them.See followings to get the spec and picture. |
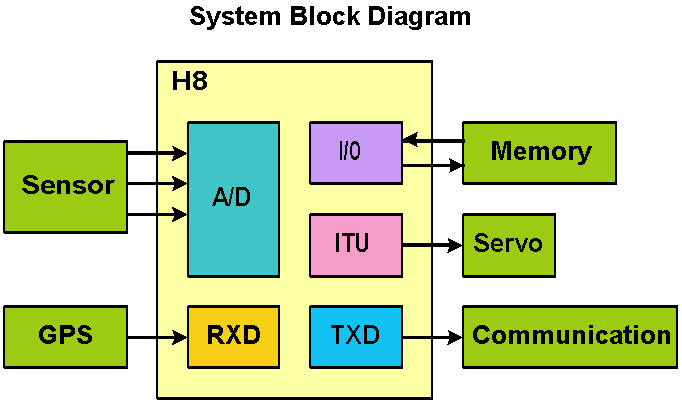
| System |
|
|
| The system are as follows. |