ARLISSは,CANSAT(空き缶サイズの模擬衛星)のサブオービタル打ち上げ実証実験であり,ブラックロック砂漠にてアメリカのアマチュアロケットグループ「エアロパック」の協力のもと,日米の大学が製作した模擬衛星の打ち上げを行う.もともとエアロパックは,自分たちのためにロケット打ち上げ大会をしていたのだが,CANSATの提唱者であるスタンフォード大学のトィッグス教授のアイディアとコーディネーションで,そのロケットにCANSATを搭載して打ち上げることになった.アマチュアロケットとはいえ,4キロメートルも上昇する信頼性の高いロケットが使われるので,パラシュートやパラフォイルをつけて地上に降りてくるまでの15-20分の間にさまざまな実証実験をすることができる.2004年度は,9月24日から26日,米国ネバダ州ブラックロック砂漠にて開催された.
日本からは日大,東大,東工大,東北大,創価大の5大学から11チームが参加し,アメリカからはネバダ大,ジョージア工科大が参加した.また,今年は社会人チームとして初めて「現場主義」(JAXA)チームが参加した.
MAEDAは,東工大松永研の次世代小型衛星開発に不可欠な新規技術開発実証という位置づけで開発した.MAEDAのミッションを以下に示す.
・高性能搭載計算機システム開発
・高速パケット通信技術
・複合センサ姿勢決定技術,および機上リアルタイム計算
・アナログカメラ(使い捨てカメラ)画像取得
この衛星の開発にあたって,まず空力降下中の姿勢運動について数値的にシミュレーションを行った.複合センサ姿勢決定技術は,数値シミュレーションの結果を実験的に検証するためのセンサシステムの開発であり,今回はジャイロ,太陽センサ,磁気センサ,GPSを複合的に用いて,状態推定理論に基づき正確な姿勢推定を試みた.またその確認のために,使い捨てカメラを搭載し姿勢推定の結果が正確であることを撮影した写真と比較することを試みた.高性能搭載計算機システム開発に関しては,将来的な要請としてセンサの取得したデータをオンボードで処理し,即座に姿勢を同定することを想定し開発した.高速パケット通信技術に関しては,センサの取得したデータ,及びMPUで処理された大量のデータを電送することを目標とした.
MAEDAの1ミッションとして,本研究室の次世代衛星開発の一要素となる高速搭載コンピュータの開発および動作実証を掲げている.今後ますます複雑化する小型衛星ミッションを実現するためには,小型・省電力で高度な演算処理が可能な高速搭載コンピュータは必須となる.MAEDAでは,その初期開発段階として,ルネサスの超小型高性能MPU”SH-4”を搭載し,動作実証を行った.
図2-1. MAEDA 機上搭載計算機系基板
SH4は内部に浮動小数点演算器を搭載しているため,内部クロックの高速と相まって,機上での軌道解析・姿勢解析演算などが高周期で行うことができる.MAEDAにおいては,太陽センサ,ジャイロセンサ,磁気センサ,GPSの値からMAEDAの姿勢を10Hzの高頻度に機上計算することが可能であった.図2-2に,機上計算機システムのアクティビティ図とシーケンス図を示す.
図2-2. MAEDA ? Activity & Sequence Diagram (UML)
高速搭載コンピュータ開発系結果・成果
カメラ制御,ダウンリンクデータ生成と通信系へのデータハンドリング,SRAMデータ保存(回収後吸い出し成功)を含め,上図にしめしたシーケンス通りほぼ動作したと考えている.本年度ARLISSにおいて,SH4をベースとした機上搭載計算機システムのハードウェア開発基礎技術,運用ソフトウェア開発基礎技術・動作実証に関する経験を得た.本技術をベースとして,本研究室次世代衛星における小型高性能搭載計算機開発実現に向けて大きな指針と自信を得た.
GMSK変調方式,9600bpsのアップリンク,ダウンリンク回線用通信基板の設計を行った.GMSKはアマチュア無線で一般的な高速通信プロトコルであり,今後のアマチュア衛星に積極的に使っていくことができると考えている.
今回作成した通信基板は,以下により構成される.
・Packet Assembler / Disassembler (PAD)
・GMSK変復調モデム
PADはパケット化,パケット解除などのデジタル処理を行う部分であり,秋月電子が開発したルネサスH8-3069Fキットを使用した.モデムには,CML社のCMX-589A-D2を使用した.上り回線,下り回線用に,それぞれ2つずつ用意し,図3-1のようにひとつの基板にまとめた.しかし実装機能としては,どちらも変調/復調が可能な完全な二重冗長系であり,ソフトウェア次第では片方のCPU,モデムでアップリンク,ダウンリンクが可能である.

MAEDA通信系基板
通信プロトコルは,AX.25を使用した.おそらくAX.25 Level-2 Ver.2.0に準拠しているはずである.AX.25の詳しい解説は他の文献に譲るが,今回実装した処理としては,上位層から以下の順で処理を行った.
1. コールサイン,情報フレーム(UI),CRC付加
2. ゼロ挿入
3. NRZIへの変換
4. スクランブル処理
スクランブルに関しては,K9NG,G3RUHで一般的であり,Uo-SAT-D,Eにも搭載された17ビットLFSRスクランブラーを用いた.
モデムにはPLLが内蔵されているが,上記スクランブル処理のためプリアンブルに一定の規則がなくなってしまうため,クロック再生ができない可能性があった.本来,プリアンブルにスクランブルをかけるものではないが,AX.25の規定ではそのようになっているようである.したがって本システムのパケット取得率はそれほど高くない.この問題は未だに解決されていない.
周波数は,430MHz,1200MHzを使用した.1200MHzは,KENWOODのTH-59を用いた.これは9600bps正式対応であり,(アルミ電解コンデンサが使われていることを除けば)今後の衛星開発に有効に使っていける.しかしKENWOODによれば開発,生産は終了したようだ.
430MHzにはALINCOのDJ-C5を使用した.これは9600bps非対応ではあるが,VCOに直接変調信号を乗せることで通信ができると考えている.ただし,VCO付近は金属遮蔽されており改造が難しかったので,バリキャップダイオード手前の可変抵抗付近に信号入力を行った.しかしこの先にコンデンサがあり,直流がうまく変調できないため,デビエーションの調整を正確にできたかは怪しい.その他にも原因が特定されていない理由により,DJ-C5からの信号をうまくデコードすることができなかった.市販のTNCの信号を同じポイントに入力したところ,正常に送信できていたことを考えると,簡単であるが見落としやすい点に問題が残っていそうである.
DJ-C5の受信系は,検波ICから直接信号を抜き出すことで対応した.調整が難しいためデコード率が良くなかったが,今後改善する予定である.
図3-2. MAEDA搭載:TH-59(左),DJ-C5(右)
結果
地上受信系の回路に不具合があり,正常な信号を受信することはできなかった.帰国後のチェックで,別の基板で正しく送受信できることが判明しており,GMSK変復調の基本試験は成功したと考えている.現在も残っている問題は,以下の通り.
・プリアンブルにスクランブルをかけた状態でクロック再生をうまく行う方法はないか.
・VCOに直接変調をかける方法に問題が残っているが,解決策はないか.
目的
今回は,降下中の姿勢を決定する基礎技術を確立するために,リアルタイム姿勢決定システムの開発を目的とした.
センサ構成
絶対角センサとして,太陽センサ(s6560)と磁気センサ(HMR2300)を,角速度センサとして,ジャイロセンサ(ADXRS150)を搭載した.また,位置決定のためにGPS(GN-80)も搭載してある.下図が,センサ基板完成図である.(磁気センサは構体上部に取り付けてある.)
図4-1. MAEDAセンサ系基板
ジャイロセンサは3軸方向に直交させ,太陽センサは視界を遮らない様に背の高い素子から離して配置した.GPS受信機は従来よりも小型であるが,外部回路として少なくともリセット回路と外部電源回路が必要となる.
OBCには姿勢推定アルゴリズムとしてカルマンフィルターを実装しており,太陽方向ベクトルと地磁気方向ベクトル,角速度から,ノイズを平滑化し,リアルタイムにクォータニオンとジャイロのドリフト量を求める事ができる.
結果
プログラムにミスがあり取得データが少なかった事,太陽センサがうまく作動しなかった事などから,クォータニオンを求めるという所までは出来なかった.しかしながら,この実験を通して改良すべき点を多く見つける事ができ,次回のフライトでは,正確に姿勢を決定できる可能性が見えてきた.
市販の使い捨てカメラ((株)富士フイルム製写るんです)を,フィルム巻き取り動作,シャッター押し動作を,それぞれモータ,サーボモータを用いることで実現し,MAEDAに搭載した.巻き取り機構の動作が不安定で,撮影された写真は以下に示す2枚のみであった.
取得された画像から,衛星は大きな振り子運動を行いながら降下したことが推定される.これはジャイロの出力結果と一致しており,少なくともジャイロは正常に動作したことがわかった.
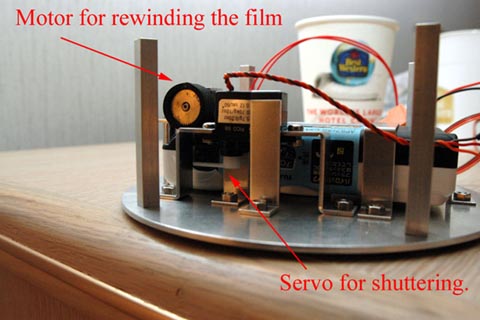
使い捨てカメラフィルム送り・シャッター機構
 |
 |
MAEDA取得写真 |
|
宮下直己 東京工業大学大学院理工学研究科機械宇宙システム専攻博士後期課程
尾曲邦之 東京工業大学大学院理工学研究科機械宇宙システム専攻修士課程
臼田武史 東京工業大学工学部機械宇宙学科

実質的な開発期間が約3週間であったことを考慮しても,全体としての完成度は高かったと言える.しかしソフトウェアのバグ確認や,地上支援システムについては全体的に不備が多く,せっかくの実験データを最大限に活用できるには至らなかった.
限られた人的資源のなかで,短期に成果をあげるためには,必要な情報を素早く集め,作業を効率よく分散することであると考える.そのためには,現状と問題点の正確な把握,また第三者に対してわかりやすく伝えることが必要である.我々がまずすべきことは,この成果をまとめること.その次に今回の実験で完成に至らなかった部分についてさらに開発を進めていきたい.