Phoenix
Phoenix開発ブログ
指導教官:松永三郎
メンバー:西田淳一、前野正樹、芦田宏樹、藤橋幸太、萩原裕介、稲川慎一、三浦尚幸

東工大松永研チームではCanSatの概念を覆すような斬新かつ挑戦的なCanSat製作を目標に、
翼型機によるフライバックをミッションとして掲げ、Phoenixの開発に取り組んだ。
機体はロケットに収納可能なサイズに収めるため全翼機形状を採用し、翼を7つのセグメントに分割して収納した。

また尾翼の代わりに上反角を付け、翼形状を数値シミュレーションにより決定した。
推力は両翼に取り付けられた2つのプロペラによって得て、これらの推力差によって旋回および姿勢安定を行った。
飛行の初期状態を安定させるため、放出後にパラシュートを展開し、翼展開、OBC駆動を行った後にパラシュートを切断する。

パラシュート切断後機体は下向きに飛行し、ある程度の速度を得た後に機首を上げて飛行状態に移行する。
その後はジャイロセンサによってyaw軸周りの角速度を検出し、2つのプロペラによって姿勢を安定させるフィードバック制御を行う。
制御に必要な全機能を一枚の基板に集約し、OBCとしてSH-2、通信機器として小型軽量なCW送信機を採用した。
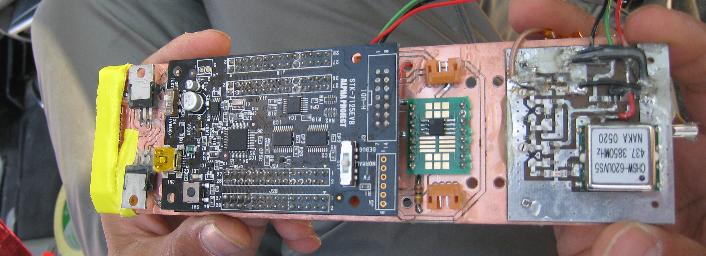
プロペラおよびOBC駆動に必要な計4つのバッテリは全て翼の中に埋め込んだ。
これまでに無いミッションであったので、開発は試行錯誤の連続だった。
特に飛行が可能であり更に収納・展開可能な機体形状とその製作方法を決定するまでの間は、検討と試作・飛行実験の連続だった。
何とかこれらを決定した後は気球・ロケットからの放出方法を検討し、
実際に上手く翼展開・OBC駆動・パラシュート切断のシーケンスを実現できるようになるまでに多くの苦労があった。

これらの経験から、何か新しいものを考案し、実際に望み通りの動作をさせるには多くのノウハウが必要である事を学んだ。
また今回の機体は飛行時にはパラシュートを切断しているため着地時の衝撃が大きく、数回飛ばすと機体が損傷した。
このため数多くの機体を製作する必要があり、ARLISSまでに製作した機体は試作機も含めて20機に上った。
一回目のフライトでは機体は無事翼を展開し、パラシュートを切断した形で発見された。
また発見された時の機体の様子から、激しく落下したのではなく、揚力を得ながらゆっくりと着地したことが推測される。
二回目のフライトではロケットからの放出直後にパラシュートの紐をプロペラが巻き込んでしまい、
パラシュートを切断できていない形で発見された。
飛行実験を繰り返した結果から、手で投げた場合は上手く飛行できるケースが多かったが、
パラシュートから下向きに放出された場合はすぐにスパイラル状態に陥ってしまうことが少なくなかった。
またパラシュート溶断までのシーケンスを正常に行えるようにするために大変苦労した。
このため、ARLISS本番で一回でも予定していたシーケンスを正常にこなせた事は大きな喜びであった。
また今回ARLISSで注目を集め、日本の大学や現地のロケット打ち上げの方々、アメリカで翼型機に関連する研究をしている方など、
様々な方に声をかけていただき、今後のアドバイスなどをもらえたことは、大きな成果であったと思う。
今後開発をスムーズに進め、飛行性能を高めていくための課題としては以下の点が挙げられる。
Copyright ©, Tokyo Institute of Technology, All Rights Reserved.
![]()
![]()
![]()