CanSat Projectは,1998年11月10日,ハワイで開催された第一回大学宇宙システムシンポジウム (USSS)において提案された小型衛星開発プロジェクトであり,日本,アメリカの多数の大学がこのプロジェクトに参加している.参加者は,設計・開発・試験・整備・打ち上げ・ドキュメント管理・マネージメント等,一連のプロジェクトを数ヶ月という短期間に行う.そういった観点から,このCanSat
Projectは国際的,教育的,そして実践的な小型衛星プロジェクトである.
1999年からは実際に打ち上げを行う機会として,ARLISSが行われている.ARLISSは米国ネバダ州のブラックロック砂漠で,現地のアマチュアロケット団体Aeropac
Rocketry Organizationの協力により,毎年夏に開催される.我々が製作したCanSat(350ml缶サイズ衛星,もしくはその3倍の大きさのOpenClass)は,Aeropacの小型ロケットに搭載され,高度4kmで放出後,10~15分程度のパラシュート降下時間中に様々な実験を行う.
また,2002年より,日本国内で熱気球を用いた実験(Space Glider Competition)が開始されている.これは,高度300m上空の有人熱気球からCanSatを放出するもので,ARLISS実験とほぼ同等の目的をもつものである.
飛行中のCanSatから画像を取得する実験は,1999年から行ってきた.特に,2000年のARLISSでは5機のCanSatのうち,1,4,5号機が画像取実験を行った.また,2001年にも1機のCanSatで画像取得実験を行った.
![]() 画像送信実験
画像送信実験
1999年には,CanSat4号機 ”Sab-Sat”において,初の画像取得実験を行った.このCanSatは,キャリアの余剰スペースを利用してロケットに搭載する小型CanSatで,135mlの缶を利用している.CCDカメラを備え,1200MHz帯を用いて無線伝送を行うことができる.
しかし,ARLISS当日においては,ロケットからの放出に失敗し,ロケット分離直後の画像データを得るに留まった.
![]() 高出力画像送信実験
高出力画像送信実験
2000年のCanSat4号機 ”Sab-Sat2” のミッションは,CCDカメラにて得られた映像を地上まで連続して受信し続けることである.確実に受信を行うため,1.3Wのアンプを用いて送信電波を高出力化して地上局へダウンリンクさせる.地上局側の指向性アンテナで受信する際には,AGCレベルを利用してアンテナを衛星方向へ指向させ,CanSatの位置をより正確に推測し,衛星放出から着陸までの画像を連続して受信し続けられることを目的とした.当実験は,超小型衛星における画像送受信技術,アンテナポインティング技術の基礎研究である.
ARLISS実験においては,落下中の約20分間の映像を連続して受信することに成功した.放出直後には,一緒に打ち上げた他大学のCanSatの映像やロケットのノーズコーン等の映像を写すことに成功した.しかし,地表に近づくにつれ,障害物や大地の影響により電波の受信状態が悪くなり,着陸の瞬間の映像は得られるに至らなかった.
![]() 無線によるカメラ方向制御
無線によるカメラ方向制御
2000年のCanSat1号機 ”Diamond Sat ( C4 Sat)” のミッションは,地上からの無線指令によってCCDカメラを遠隔操作し,任意の画像を地上に送信することである.CCDカメラの回転角はポテンショメータによって測定し,回転角データは
CanSatに搭載したメモリに保存する.その目的は,大別して2つであり,地上局から送信したコマンドを衛星が受信するアップリンク技術試験,送信したコマンドによりCCDカメラを任意の方向に指向させる,遠隔操作技術試験である.当実験を通して,超小型衛星における遠隔操作技術,
CCDカメラの指向制御を行うことができる小型視覚システムの実現の基礎研究を行う.
Diamond Satは,動作試験においては無線指令により機構が完全に動くことを確認し,通信も完全に行えることを確認していたが,ARLISS当日の打上げにおいては,トラブルのため望んだ結果は得られなかった.
後日行われた北海道大樹町におけるCanSatの追加実験においては,良好なデータが得られた.
まず,回転機構の動作が,CCDカメラから得られた画像から確認できる.北海道実験においては,Diamond Satをキャリアに搭載,固定しバルーンで上昇させている間に,無線によるコマンドを送信した所,良好な動作をした.以下に,カメラの回転機構を示す.

![]() SSTVを用いた画像送信実験
SSTVを用いた画像送信実験
2000年のCanSat5号機 “SSTV-Sat”は,地上局からの無線指令を与えて静止画を取り込み,SSTV (Slow Scan Television)
方式によって地上局に画像データを送信する.その目的は,任意の時間の画像データを取得することであり,「映像の垂れ流し」ではない確実なデータ電送技術を確立することである.
SSTV方式が使用されているため,アナログ無線機を使用することが可能で,超小型衛星におけるより実際的な送受信技術の基礎研究を行うことが可能である.
SSTV-Satは,落下中に合計28枚の任意時間における画像の取得に成功した.
![]() カメラ切り替え実験
カメラ切り替え実験
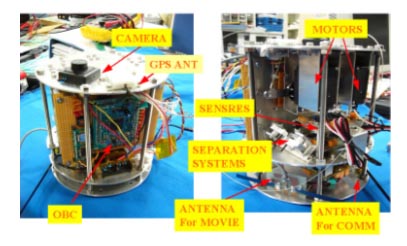
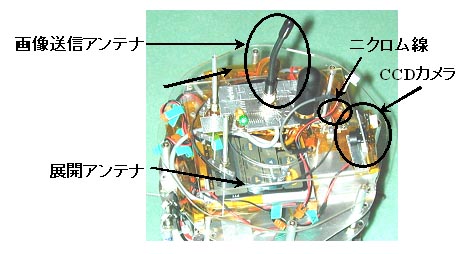
2001年のCanSatでは,”Sab-Sat3”と名づけられた,CCDカメラによるリアルタイムの動画像取得ミッションを行った.SabSatに鉛直下向き方向と水平方向に一つずつ,2台のCCDカメラを搭載し,リアルタイムに2方向の動画像を得るミッションである.2台のCCDカメラからの信号をOBC(On
Board Computer)によって一定間隔で切り替えて地上にダウンリンクするシステムを開発した.送信機を一つにまとめることができ,衛星の小型軽量化に大きく寄与する技術である.
ARLISS実験においては,2台のCCDカメラが10秒おきに切り替わる様子を確認することができた.
2001年のARLISS実験より,目標地点からどれだけ近くに着陸させることができるかを参加各大学間で競い合う"Come Back Competition"がはじめられた.目的は完全に自律飛行でCanSatを回収する技術を確立することである.
![]() GPSを用いた航法
GPSを用いた航法
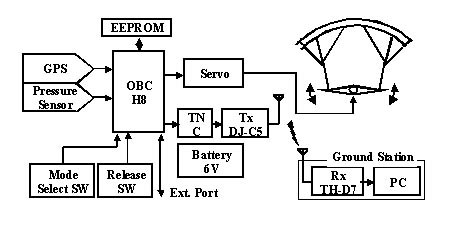
2001年には,はじめてのCome Back Competitionが行われ,東工大ではパラフォイルを用いた自律飛行制御ミッションを行った.CanSat本体にGPS受信機を搭載し,単独測位の結果を参照しつつパラフォイルを操作し,任意の地点までCanSatを自律的に誘導制御する.
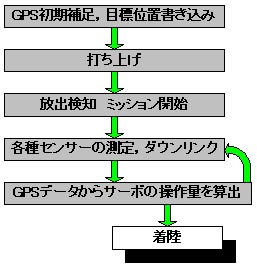
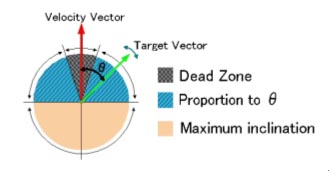
飛行制御ミッション系のミッションシーケンスをFigure 2に示す.打ち上げ前にGPS衛星の初期捕捉及び目的地の位置データを搭載GPS受信機で行い,目標位置をメモリに書き込む.放出後は,GPS受信機からのデータをもとにパラフォイルを制御し,目的地まで飛行させる.今回使用したGPS受信機は位置に加えて速度ベクトルも算出する.あらかじめ設定した目標位置の情報と,GPS受信機から得られたデータをOBCで処理し,進行方向を表す速度ベクトルと,目標方向ベクトルを一致させるようにサーボモータを介してパラフォイルを操作する.2つのベクトルのずれとサーボの操作量の関係をFigure
4に示す.なお,パラフォイルの迎角は固定し,高さ方向の制御は行わなかった.
![]() 2つのサーボモータを用いた制御機構
2つのサーボモータを用いた制御機構
2002年のSpace Glider Competitionでは,サーボモータを2つ搭載した.これにより,従来固定されていたパラフォイルの迎角も制御可能となり,旋回にくわえ,降下速度の調整も行えるようにした.
![]() パラシュート用いた二段階展開機構
パラシュート用いた二段階展開機構
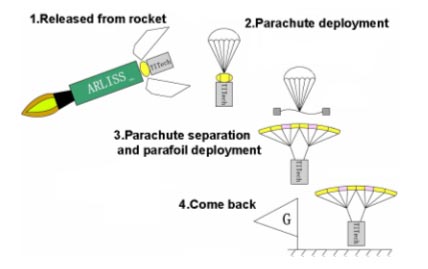
2003年のARLISSでは,ロケットからの放出時の姿勢を安定化させ,確実に定常飛行に移行することを目標として,パラシュートとパラフォイルの両方を利用した二段階展開が提案された.
パラフォイルの展開は,ある程度速い速度で降下している時に行うほうがラインの絡まりが少なく,不安定状態に陥る可能性が低くなる.これを実現するために,ロケットからの放出時は小型のパラシュートのみ展開し,メインとなるパラフォイルはベルトを用いて収納しておく.比較的速い速度で姿勢が安定した後,分離機構を用いてパラシュートを切り離す.パラフォイルを固定していたベルトは,パラシュートに引っ張られるように,衛星からはずれ,展開が完了する.
![]() テザー利用実験
テザー利用実験
1999年には,宇宙空間でのテザー利用を想定した基礎実験を行うために,2機のCanSatを製作した.
CanSat”Spider”は,テザーが取り付けられた錘を本体から放出,進展させた後,テザーを巻き取ることにより錘を回収する基礎実験である.ARLISSでは,テザーの張力制御などは行わず,全長70cmのテザーを決められた時間放出し,回収することを繰り返すミッションとした.
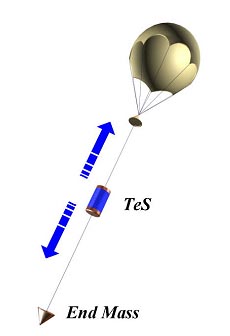
CanSat”TeS”は,テザーを使って移動する機構の基礎実験である.宇宙空間でのテザー利用を想定し,外部に張られたテザーに張力が存在しない状態においても,テザーを伝った移動が可能な機構を備えている.ARLISS実験においては,パラシュート近辺,テザー末端に取り付けられた錘の間を移動するミッションを行った.
![]() GPS相対航法実験
GPS相対航法実験
2000年のCanSat3号機であるGNS Satは小型衛星によるフォーメーションフライトの基礎実験を想定して開発した.GPSを利用しての自分自身の位置決定と他のCanSatとの相対位置の決定を目的とする.そこでGNS SatではGPSデータ取得, CanSat間通信を行った.
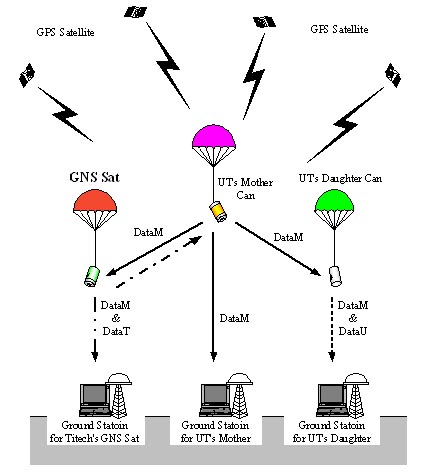
CanSat間通信では,同時に落下している東大のMother CanSatと相互通信を行った.GNS SatはGPS受信機の内部プログラムで計算される緯度,経度,高度データの他に,各GPS衛星からの擬似距離,搬送波位相,ドップラー周波数なども取得する.これらのより詳細なデータをメモリに蓄えることによって,後処理で地上局・他のCanSatを基準としたDGPS,干渉測位などを行い,単独測位に比べてより精度の高い位置決定を実現する.
![]() センシング技術実験
センシング技術実験
2000年のCanSat2号機は,1.加速度センサ(3軸),2.ジャイロ(3軸),3.地磁気センサ(3軸),4.圧力センサを搭載し,センシングミッションを行った.1,4のセンサから高度情報が,2,3のセンサから姿勢情報が得られる.これらのデータは,内蔵のEEPROMに書き込まれるとともに,TNCを介して地上局へ送信される.ただし,地磁気センサが送信機の影響を大きく受けるため,1分毎にデータ送信を中断するという制御を行った.
打ち上げ前に電源を投入し,打ち上げ方向の加速度データを,サンプリングレート50HzでメモリAに書き込む.メモリAは,打ち上げの遅れに対応できるように上書き可能となっており,キャリア放出後30秒経過した時にデータ書き込みを終了する.なお,放出はマイクロスイッチによって検出する.キャリアから放出後,搭載したすべてのセンサデータを5HzでメモリBに書き込む.同時に2,3,4のセンサデータをTNCにより1200bpsで地上に送信する.着地した時点で実験終了とする.
![]() 展開機構実証実験
展開機構実証実験
2001年には,松永研究室が2003年6月にロシアより打ち上げたCubeSatのアンテナ展開機構の試験を,CanSatを用いて行った.
CubeSat用アンテナ展開機構の確認実験であるため,CubeSatに搭載予定のアンテナ展開機構をそのままの形で搭載した.ARLISS実験では正常に動作することが確認され,CubeSatへの搭載が決定された.
![]() データ中継技術実験
データ中継技術実験
2002年には,1ユニットで送受信が可能なTNCを新たに開発し,データ転送技術の基礎実験を行った.本ミッションでは,CanSatのほかに,ローバーを新たに開発し,ローバーのGPSデータをCanSatを経由して地上局へ転送する.
また,同じ周波数を用いて複数のデータを送信するために,GPS時刻を用いた時分割多重伝送方式を採用し,各データを地上局およびローバーへブロードキャストする.ローバーに関しては,CanSatのGPSデータを受信してCanSatを追いかける追跡ミッションを同時に行った.
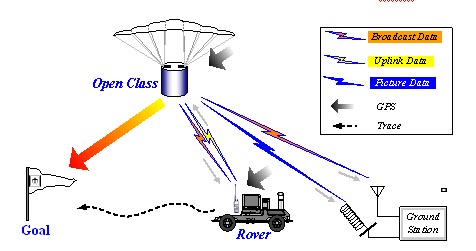
CanSatは,マイクロスイッチにより放出検知を行う.放出後,搭載センサを用いて位置,角速度,加速度,風速などの計測をはじめる.ここで,地上のローバーはGPS受信機を用いて単独測位を行い,得られたGPSデータをCanSatに送信しているので,CanSatではローバーのGPSデータを受信し,識別用のヘッダを付加した各データを地上局とローバーへブロードキャストする.
ローバーでは,CanSatのGPSデータを受信し,2つのGPSデータを用いてCanSatを追跡する.また,CanSatには他の機器から独立したCCDカメラと送信機が搭載されており,カメラ画像を地上局に送信する.
![]() 形状記憶合金を利用した旋回実験
形状記憶合金を利用した旋回実験
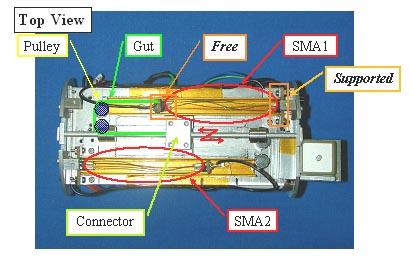
2002年のCanSatでは,衛星の旋回機構としてShape Memory Alloy(以下SMA)を用いた機構を開発し,その効果を検証する基礎実験を行った.パラフォイルの旋回操作はパラフォイル後縁からのびた紐の操作と重心移動によって行う.CanSatでは,重心移動による旋回操作を行うことを目的とした.本体にはGPS受信機と位置センサを搭載し,衛星の動きとSMAの動作を同時にモニタリングすることができるようになっている.
SMAは小型軽量であり,引き伸ばされたSMAは通電加熱を行うことで元の長さに戻ることから,収縮型のアクチュエータとして用いることができる.重心移動機構は直線運動するため,SMAを容易に適用できると考えられる.