Last Update: 2003/June/24
Last Update: 2003/June/24
| What's ADS? | ||||||||||||||||||||||
| Attitude Determination Subsystem(姿勢決定系)は,軌道上でCUTE-I がどこを向いているのか,どのような運動をしているのかを決定する. 天文観測,気象観測や衛星通信のように,宇宙空間または地球上の特定の場所の計測や通信を行うようなミッションには,以下のような技術が必要になる. ・人工衛星がどこを向いていて,どのような運動をしているのかを知る. (姿勢決定 = Attitude Determination) ・人工衛星を目標の方向に動かし,安定させる. (姿勢制御 = Attitude Control) CUTE-Iは,重量・スペースに限りがあったため,上記2つの技術のうち姿勢決定技術の確立を目指す. |
||||||||||||||||||||||
| Objectives | ||||||||||||||||||||||
| 軌道上におけるCUTE-I の運動を計測するために以下のことを行う. ・ADS用センサの選定 ・センサ回路の設計 ・環境試験(熱真空試験,振動試験など) ・校正試験(キャリブレーション) ・運用(軌道上におけるCUTE-Iの姿勢決定) CUTE-I ADSは,これらの作業を経ることで極限環境下で一定の精度を保ちつつ,CUTE-Iの姿勢を決定することを目的とする. |
||||||||||||||||||||||
| Sensor Configuration | ||||||||||||||||||||||
| CUTE-Iでは,以下に示すセンサを搭載する. | ||||||||||||||||||||||
| CUTE-Iに生じる角速度を計測する.CUTE-Iでは,冗長性を考慮し,4個のジャイロを搭載している. | ||||||||||||||||||||||
|
||||||||||||||||||||||
| 加速度計では,CUTE-I に生じる遠心加速度を計測し,そこからCUTE-I の回転を求める.加速度計から得られるCUTE-I の回転情報は,ジャイロで得たデータとの比較に利用する. また,加速度計も冗長性を考慮し,4軸の加速度を計測する. |
||||||||||||||||||||||
|
||||||||||||||||||||||
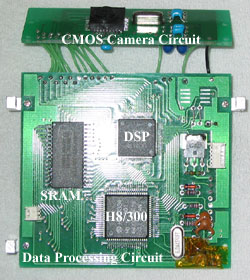
| 市販の CMOSカメラを用いて,LSSオリジナルの太陽センサを開発した. 太陽センサでは,CMOSカメラで太陽を撮影し,CMOS画像のピクセルを基準とした画像上の太陽の位置をOBCへ出力する.そして地上局でセンサからの情報を用いてCUTE-I から見た太陽方向ベクトルを求める. また,CUTE-IではCCMOSカメラが取得する画像そのものを地上へ送信することはできない. さらに詳しい情報は,太陽センサページで解説する予定である(現在,製作中). |
||||||||||||||||||||||
| Sensor Circuit | ||||||||||||||||||||||
| ADSでは,以下に示す3つの基板を製作した. | ||||||||||||||||||||||
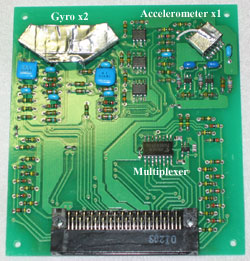
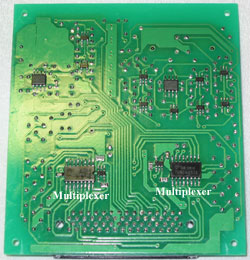
| センサ基板1には,ADS用のジャイロ,加速度計を搭載している.さらに,マルチプレクサを搭載し,CUTE-Iの各所に取り付けられたサーミスタ,電流センサから得られるデータの中継点にもなっている. | ||||||||||||||||||||||
|
||||||||||||||||||||||
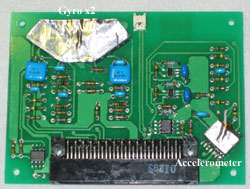
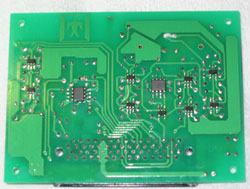
| センサ基板2には,ジャイロおよび加速度のみを搭載している. | ||||||||||||||||||||||
|
||||||||||||||||||||||
| 太陽センサ基板は,CMOSカメラ基板とデータ処理基板に分かれている. CMOSカメラ基板上には,CMOSImage Sensorが搭載され画像取得を担う.また,データ処理基板は,取得した画像データを利用してCMOSカメラ画像上の太陽光位置を計算し,OBCへ出力する. 参考に,本CMOSカメラで取得したモノクロ画像を示す.画像には,開発者のデスクトップPCが写っている. |
||||||||||||||||||||||
|
||||||||||||||||||||||
|
||||||||||||||||||||||
| Attitude Determination Method | ||||||||||||||||||||||
| CUTE-I における姿勢決定方法を簡単に説明する予定である(現在,作成中). | ||||||||||||||||||||||
| Development History | ||||||||||||||||||||||
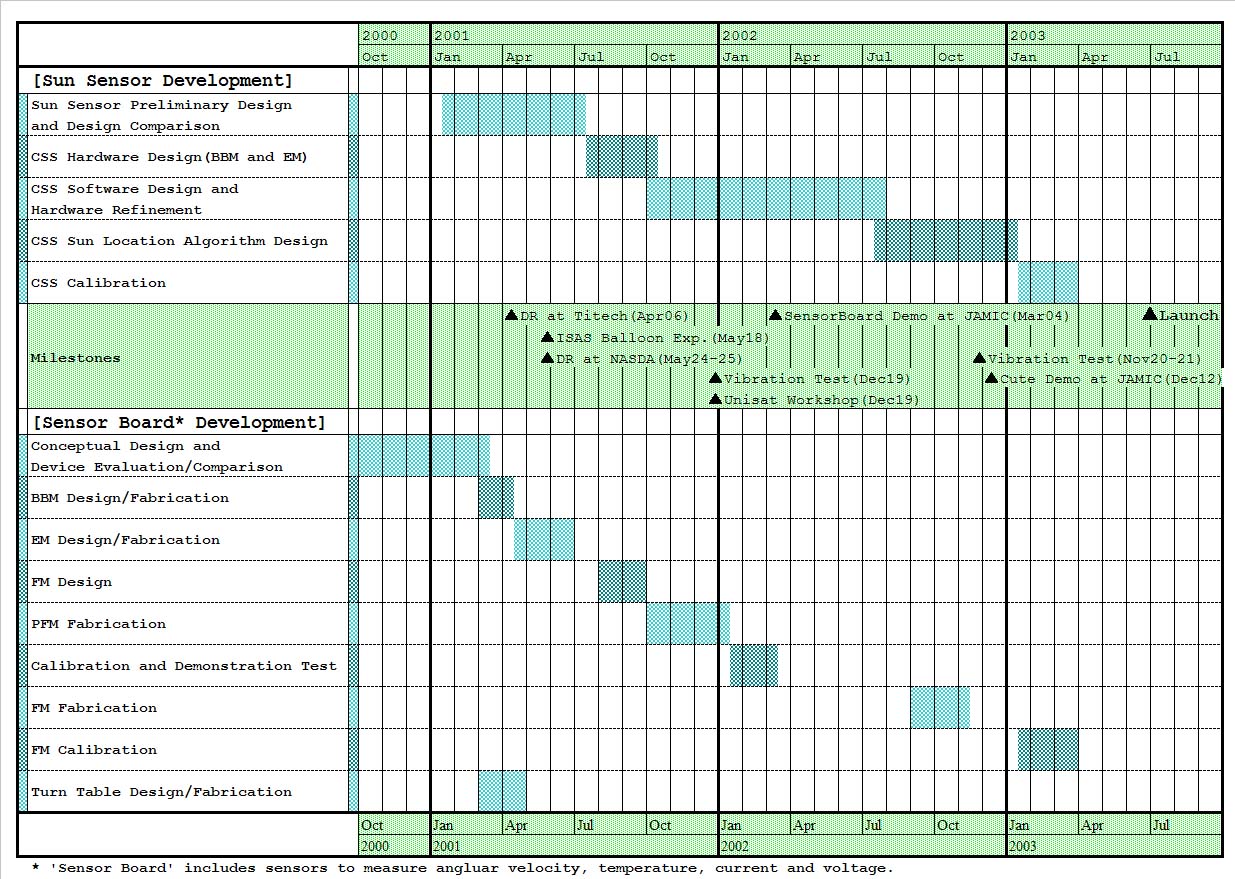
| 現在までの開発経過を示す. ADSでは,2000年第4四半期から開発をスタートさせ,2003年初頭にFM基板完成,2003年6月にロシアへのシップメントを終えた.現在,2003年6月30日の打ち上げに向けて運用および解析の準備中である. |
||||||||||||||||||||||
 |
||||||||||||||||||||||
| Future Plan | ||||||||||||||||||||||
| ADSとしての今後の目標は,CUTE-Iの開発を通じて得られた姿勢決定技術を踏まえ,姿勢決定精度の向上を図ると伴に,姿勢制御技術の開発に着手していく予定である. | ||||||||||||||||||||||


|
||||||||||||||||||||||
|