超小型衛星用分離機構の機能実証実験
本ページでは,JAXA M-Vロケットを用いた超小型衛星用分離機構の機能実証実験を行うための東京工業大学サブペイロードTSD (Tokyo Tech Separation system Demonstration)の開発背景と目的、開発方針、開発概要、打ち上げ実験手順、について紹介する.
数kgクラス超小型衛星は、開発期間の大幅な短縮とそれに伴う開発費用の大幅な削減が見込まれ、先端科学技術の早期軌道上実証や教育目的の実践的開発が実施可能などの理由で、大学や研究機関、宇宙関連企業を中心に大きな注目を集めている。その中でも、1辺10cm立方体、1kgの世界最小超小型衛星CubeSatについては、世界で60ほどの開発プロジェクトが立ち上がっている。東工大松永研もCubeSat “CUTE-I”の開発を進め、2003年6月30日にロシアのプレセツクからROCKOTにより成功裡に打ち上げられた。本衛星は現時点で打ち上げ後1年9ヶ月を超えて順調に動作しており、学生の運用の下、それぞれに計画された軌道上実験をこなしてきた[1,2]。現在、本研究室では2~3kgクラス超小型衛星Cute-1.7[3]や20kgクラス小型衛星[4]の設計、開発を進めている。
このような超小型衛星の打ち上げに必須となるのが衛星をロケット打ち上げ時に安全に保持し、軌道上で確実に分離できる超小型衛星用の保持分離機構である。超小型衛星の打ち上げの場合、ロケット側から与えられるインターフェースは、衛星と分離機構を含めてサイズ、重量が割り当てられることが多く、ロケットおよび主衛星への影響を最小限に抑えるため、分離タイミング、分離方向、分離速度、非火工品の使用などがロケット側から指定される。そのため、超小型衛星の打ち上げにおいては、上記の条件を満たす保持分離機構を用意する必要が生じる。しかし、日本ではμ-LabSatやWEOSなど50kg級小型衛星用分離機構の開発例はあるが、数kg級小型衛星用保持分離機構の開発例はほとんどない。しかも、従来分離機構のほとんどが火工ナットを用いており、超小型衛星用分離機構として適用困難である。こうした状況の中で東工大松永研では、CUTE-I用の分離機構として爪把持式の機構を提案し、ROCKOTとのインターフェース回路、電源回路も含めた開発を行った。開発した分離機構は、JAXAでの振動試験、JAMIC(地下無重力実験センター)での分離機能確認試験などを経て[5,6]、打ち上げられ軌道上に放出されたCUTE-Iからの電波を受信できたことで、分離機構が軌道上で正常に動作したことを確認した[7,8]。Fig.1にCUTE-Iを搭載した状態の分離機構を示す。
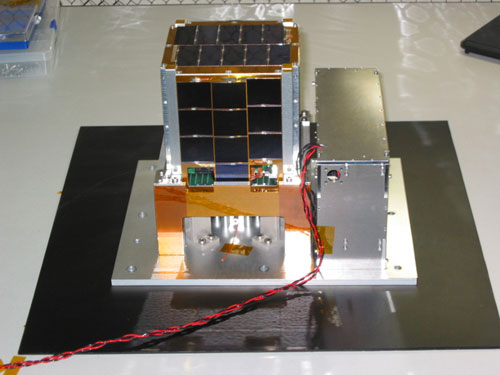
Figure.1 CUTE-I & Separation System
本研究室では、今後の超小型衛星の打ち上げに際し、JAXA/ISASのM-Vロケットの利用を大いに期待している。M-Vロケットを超小型衛星の打ち上げ機会として確保することが可能となれば、国外のロケットで打ち上げる際に発生する煩雑なインターフェース調整、輸出許可申請なども含めた衛星およびスタッフの渡航に関する手続きなどが緩和され、国内での超小型衛星開発の発展に大きく貢献することが可能となる。一方で、固体ロケットであるM-Vロケットは、振動、衝撃環境が現在主流の液体ロケットと比較して厳しく、また衛星および分離機構との各種インターフェースが未定であることなど、課題も存在する。そこで、本研究室ではM-Vロケットとのインターフェースを考慮した分離機構とダミーマスで構成される実験装置Tokyo Tech Separation system Demonstration(TSD)を開発し、打ち上げ後、軌道上で分離実証実験を行うこととした。本研究室が提案する爪把持式分離機構のM-Vロケットにおける分離実証、言い換えれば、M-Vロケットの打ち上げ環境での動作実績を得ることが目的である。
Fig.2にTSDの寸法および概要図を示す。TSDの最大包絡域はL300×W150×H136mmで、内部は電子回路部、分離機構、ダミーマス、分離空間で構成される。電子回路部は、ロケットとの電気的インターフェースおよび分離挙動計測用の回路が搭載されている。打ち上げ実験では、分離機構はロケットの第3段分離後にロケット側から送られる分離許可信号を受信するまで分離マスを保持する。キリバス共和国クリスマス島ダウンレンジ局の可視範囲内で分離信号を受信後、ニクロム線を5秒間加熱し、分離マスを分離放出させる。このとき、分離マスが分離機構内のバネによって押し出される間の分離時挙動と、分離後の運動挙動計測を行い、超小型衛星用分離機構の性能評価を行う。本実験で計測するデータは、分離信号受信前はBox内部の4点の温度と実験装置のステータスをリアルタイムでダウンリンクする分離前フェーズと、分離時のデータを加工、保存し、分離後残りの可視時間を利用してダウンリンクする分離後フェーズで構成される。今回の分離実験は密閉されたサブペイロードボックス内で行うので、分離マスは軌道上に放出されないことに注意する。
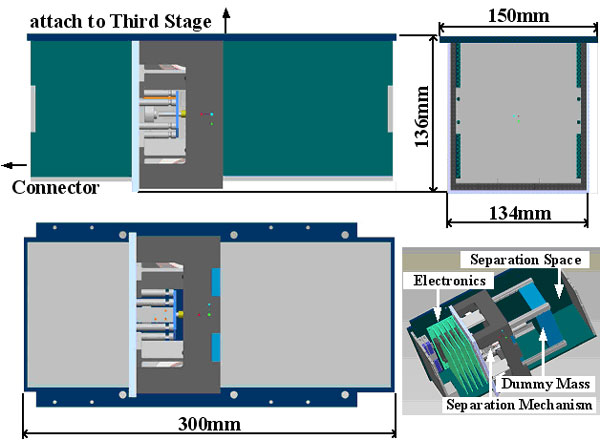
Figure.2 TSD Shape
次に、システムブロックダイアグラムをFig.3に示す。TSDは、図中の4個のサブシステムと構造サブシステムで構成されている。ロケットI/Fサブシステム(Rocket I/F Subsystem)では、ロケットとTSDとのI/Fを担い、電源、PCMテレメトリ、分離タイマー信号を処理する。分離機構・計測サブシステム(Separation Mechanism and Measurement Subsystem)では、改良版分離機構とナイロン線熱切断用ニクロム線加熱制御回路、温度および分離挙動を計測するためのセンサシステムとデータ処理系などで構成される。リアルタイムデータ処理サブシステム(Real Time Data Processing Subsystem)では、分離信号受信前に計測している各部の温度データをPCMテレメトリへと送る。分離データ処理サブシステム(Separation Data Processing Subsystem)では、搭載MPUが計測データを受け取りSRAMに高速(4kHz)で書き込み、実験後に書き込んだデータをPCMテレメトリへと送る。
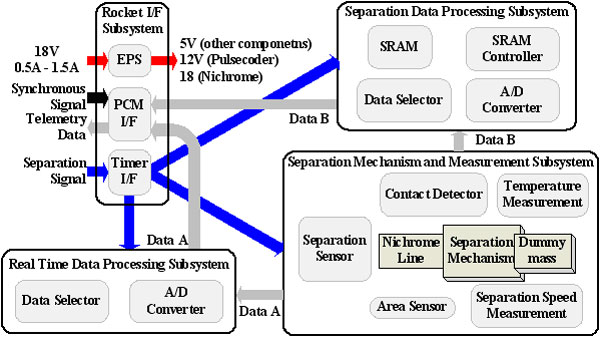
Figure.3 TSD System Block Diagram
分離機構
TSDには、CUTE-I用に開発した分離機構[7,8]を基本的に踏襲した。CUTE-I用分離機構からの改良点として、まず、分離方向を機軸方向から横方向に変更した。これは打上時の振動・衝撃環境が大きく悪化することを意味するが、将来的にM-Vでピギーバック打ち上げを行う際にも同様な方向に打ち上げせざるを得ないと考えられるからである。次に、機械式スイッチを用いた分離検知機能を追加して、その情報をロケット側テレメトリでダウンリンクできるようにして、分離確認方法を確実化した。爪機構の保持解放システムを構成するナイロン線-ニクロム線系の破断に対する信頼性向上を図ることを目指して二重冗長系を実験的に検討したが、最終的に、現状では一重系がシステム的に最も信頼できると判断した。本件は今後も引き続き検討事項である。Fig. 4にダミーマスを搭載した分離機構の模式図と写真を示す。また,Fig.6にくみ上げた際のTSD概観を示す.
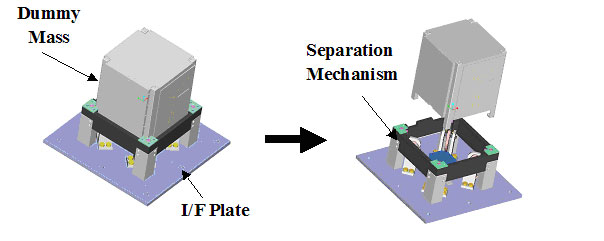
Figure.4 TSD Separation Mechanism

Figure.5 TSD Separation Mechanism
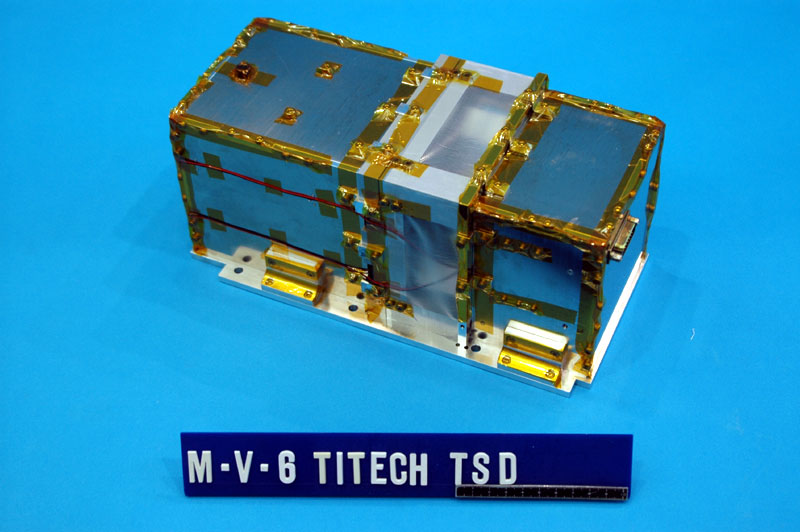
Figure.6 TSD Flight Model
分離計測系サブシステム
TSDでは、全部で5つのセンサを用い、分離確認および分離挙動を計測する。
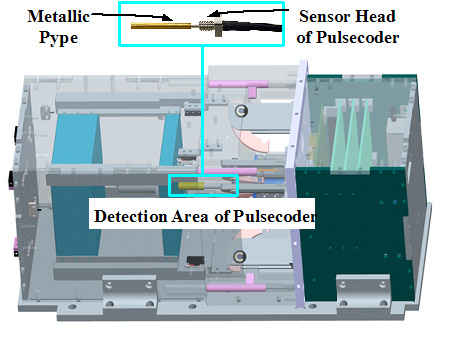
3つのセンサは全てデジタルセンサであり、検知時刻をデータとして保存するので、それぞれの検知時刻を比較することで、分離速度や分離時の擾乱を計測することを目的とする。また、分離確認センサは、ダミーマスが確実に分離機構から分離したこと確認する役割も担う。分離開始から、衝突までにSeparation Sensor、Photoelectric Sensor、Collision Sensorが果たすイメージをFig. 8に示す。
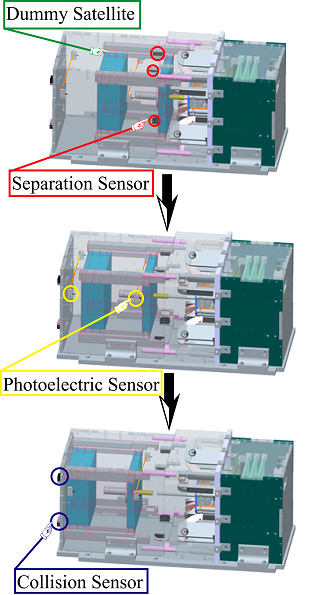
Figure.7 TSD Digital Sensors
TSDは打ち上げ前に電源が投入される。即ち、ホットローンチである。そして、ロケット打ち上げ後、メインペイロードである主衛星(ASTRO-E2)を分離して、さらに地球を周回したX+1421秒からX+1680秒までの259秒の間、クリスマスダウンレンジ局の可視範囲内で実験を行う。TSDが行う分離そのものの実験時間は5秒未満という短い時間であるが、短時間の現象を扱うため拘束サンプリングのデータを限られた可視時間内で確実に受信することが求められる。そこで、TSDではFig. 8のようなタイムラインにそって分離実験を行う。まず、TSDはM-V-6側から送られる分離許可信号を受信する前後で動作を大きく変える。分離許可信号の受信前までは、実験待機状態(分離前フェーズ)であり、TSDのステータス、外壁2箇所および2つのニクロム線の温度をリアルタイムでダウンリンクする。このデータは打ち上げ直後、クリスマス島以外のダウンリンク局でも取得可能である。分離許可信号の受信後は、実験モードに切り替わる(分離後フェーズ)。ここでまず、SRAMのデータをリセットし、センサの誤動作などによるSRAMへの書き込みを無効にする。受信後0.5秒(T+0.5秒)にニクロム線の加熱を開始し、各種センサの取得データをSRAMに4kHzでの書き込みを開始する。約T+3.5秒前後にナイロン線は焼き切れてダミー衛星は分離され、1秒以内に正面の壁に衝突する。TSDは、T+5秒までニクロム線の過熱と高速サンプリングによるデータ取得を行う。この後、SRAMは書き込みモードから読み込みモードに切り替わり、実験データのダウンリンクを開始する。SRAMデータのダウンリンクは、可視時間が持続する限り同じデータを繰り返しダウンリンクすることで確実に実験データを受信できるようにする。受信したデータは、クリスマスダウンレンジ局で所定のフォーマットに加工され、テキストファイルとして東工大へ送信される。また、受信した生データも後日回収する予定である。消費電力に関しては。通常18V×0.5A=9W未満であるが、ニクロム線加熱する5秒間は18V×2.0A=36W程度まで上昇する。
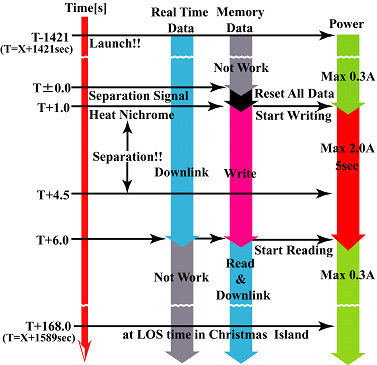
Figure.8 TSD Experiment Sequence
実験後掲載予定.
![]()
![]()
![]()