HIBARI -ひばり-
可変形状姿勢制御実証衛星
ABOUT
可変形状姿勢制御実証衛星 ひばり
東京工業大学 工学院機械系と同大学 理学院物理学系は50 kg級の超小型衛星「ひばり」を開発しました。 この衛星は可変形状を利用した姿勢制御・軌道制御 “VSAC”(Variable Shape Attitude Control)の軌道上技術実証を目的としており、 4枚の可動太陽電池パドルを動かした際の反動や大気抵抗の調整によって、姿勢制御や軌道制御を行う実験を行います。
「ひばり」は宇宙航空研究開発機構(JAXA)の革新的衛星技術実証2号機の実証テーマとして採択されており、 2021年10月以降にイプシロンロケット5号機にて内之浦宇宙空間観測所から打上げられる予定です。 投入予定軌道は近地点高度547 km、遠地点高度565 km、降交点地方太陽時 9:30の太陽同期軌道であり、宇宙空間にて、VSACの技術実証を行います。 更に、観測装置としてパドルの動作を確認するための小型カメラの他、精密姿勢誘導のための可視光望遠鏡、 そしてと共同で開発した紫外線カメラを搭載しています。 北極や南極上空のオーロラからの紫外線放射を撮影し、地球磁気圏と荷電粒子の相互作用の現場を観測するなどのミッション実施を予定しています。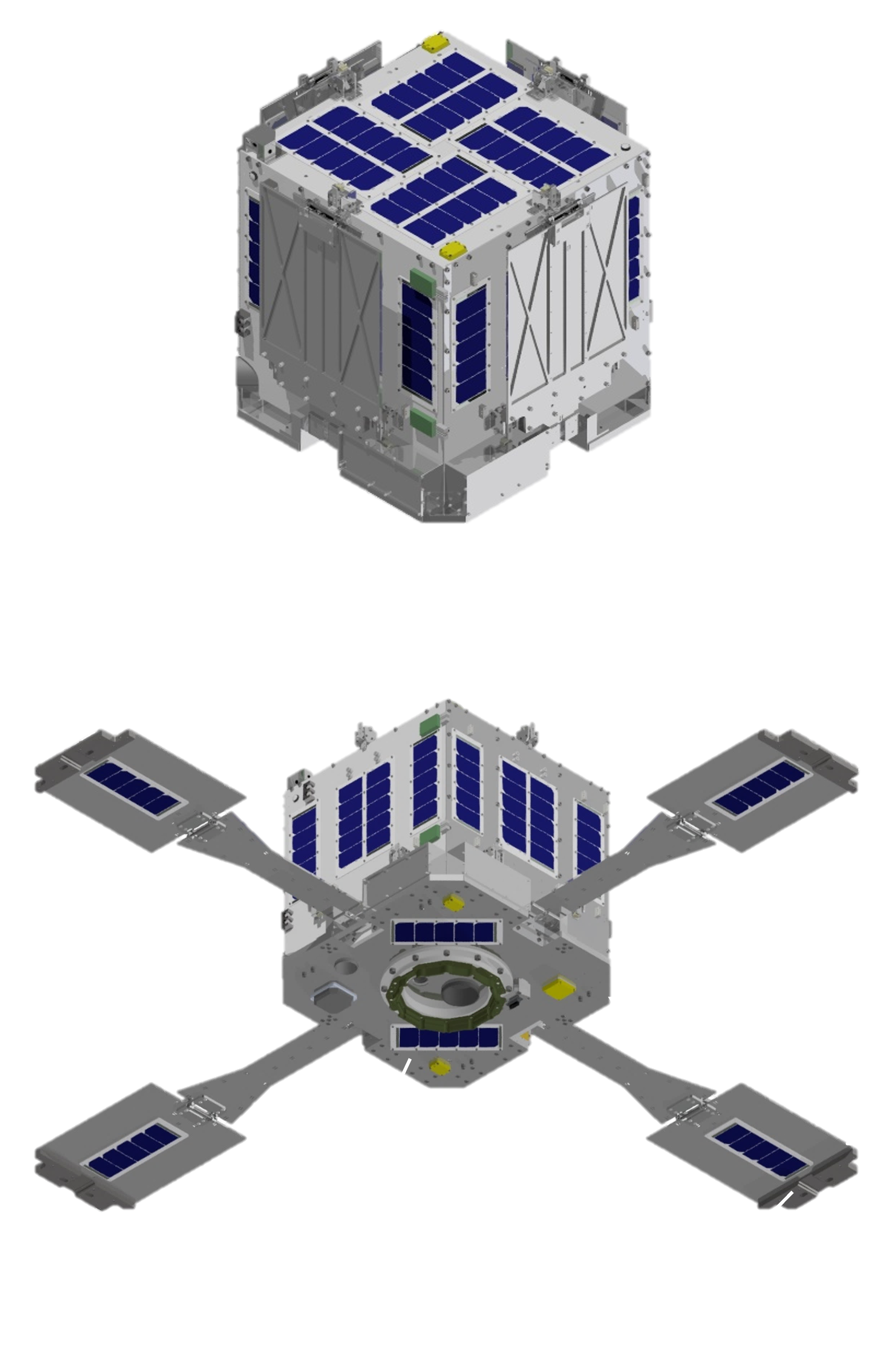
「ひばり」は宇宙航空研究開発機構(JAXA)の革新的衛星技術実証2号機の実証テーマとして採択されており、 2021年10月以降にイプシロンロケット5号機にて内之浦宇宙空間観測所から打上げられる予定です。 投入予定軌道は近地点高度547 km、遠地点高度565 km、降交点地方太陽時 9:30の太陽同期軌道であり、宇宙空間にて、VSACの技術実証を行います。 更に、観測装置としてパドルの動作を確認するための小型カメラの他、精密姿勢誘導のための可視光望遠鏡、 そしてと共同で開発した紫外線カメラを搭載しています。 北極や南極上空のオーロラからの紫外線放射を撮影し、地球磁気圏と荷電粒子の相互作用の現場を観測するなどのミッション実施を予定しています。
ひばり システム諸元
| サイズ | 570mm × 570mm × 550mm |
| 質量 | 50kg |
| 通信 | S-band Tx / Rx × 2 Globalstar Tx × 1 |
| バッテリー | 最大発生電力 40.1W / Li-ion Battery 161Wh |
| 軌道 | 550 km 太陽同期軌道 |
Mission
可変形状システムの挑戦
VSAC(Variable Shape Attitude Control)
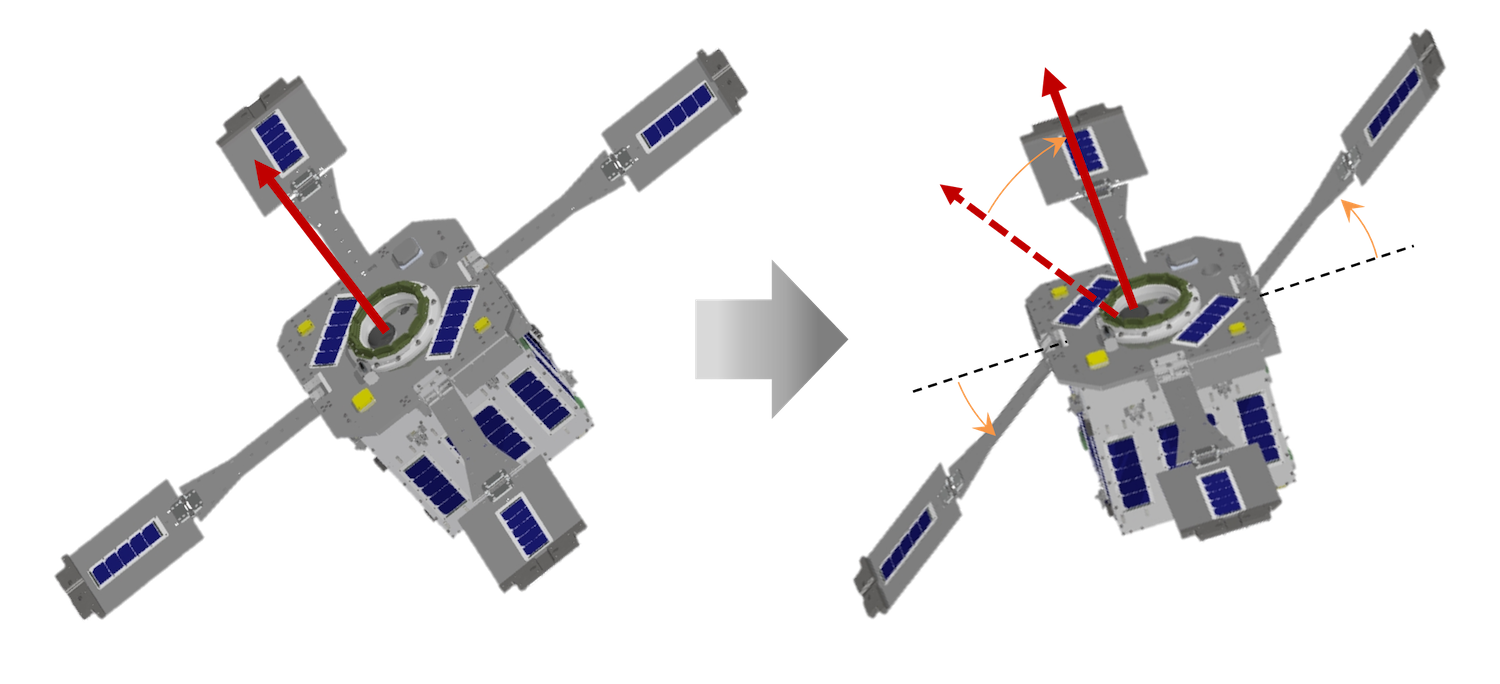
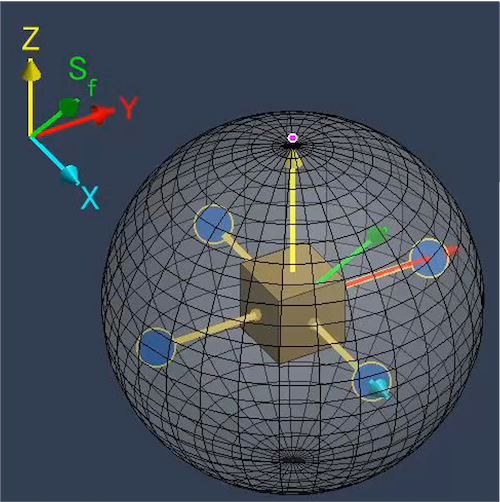
可変形状姿勢制御とは、太陽電池パドルなどの衛星構造の形状の一部分を変化させ、その反動によって姿勢を変更するという技術であり、 これが宇宙システムとして実証確立されれば、衛星のセンサをある方向に素早く向けたいときなど、効率的に姿勢を制御することが可能になります。 また、従来の姿勢制御アクチュエータを併用することでさらに高精度な姿勢指向制御なども可能になります。
形を変えることで物体が動く、ということは非常に汎用的です。 可変形状姿勢制御が可能になれば、衛星だけでなく将来の宇宙機などすべての移動体に対して可変形状機能を利用した新たな機能を付加する、 あるいは性能を向上させるということが当たり前になってくるでしょう。
()
形を変えることで物体が動く、ということは非常に汎用的です。 可変形状姿勢制御が可能になれば、衛星だけでなく将来の宇宙機などすべての移動体に対して可変形状機能を利用した新たな機能を付加する、 あるいは性能を向上させるということが当たり前になってくるでしょう。
()
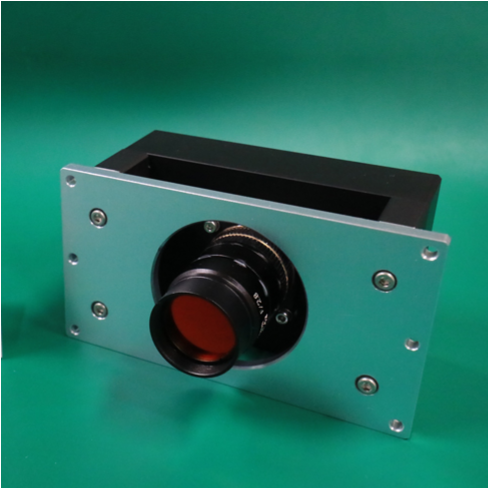
UVCAM
超小型衛星搭載用紫外線カメラ
東京工業大学 理学院物理学系 河合・谷津研究室とエイブリック株式会社が開発した、 超小型衛星搭載用の紫外線カメラ “UVCAM”を搭載します。 300~340ナノメートルの近紫外線帯にて、衛星軌道上から北極・南極上空に現れるオーロラの紫外線発光を観測し、 地球磁気圏と荷電粒子の相互作用をその場観測するとともに、 次期紫外線天文衛星「うみつばめ」のパスファインダーとして背景光強度の評価を行います。
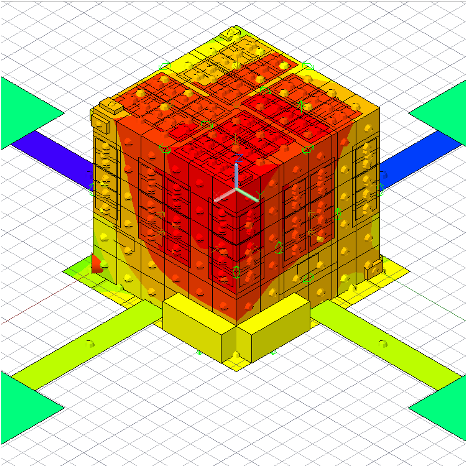
超小型衛星汎用バスの開発
〜次期衛星に向けて〜
ひばりに搭載したバス機器の多くはCubeSat規格を遵守してものを選定しており、 汎用性の高いバスシステムを開発しました。 これによりCubeSatにも適用可能な汎用バス技術の獲得を目指しています。
ひばりで獲得したバス技術は革新的衛星技術実証3号機に搭載される 「マルチスペクトルカメラを搭載した陸・海観測超小型衛星計画」である超小型衛星「うみつばめ」に応用されます。
ひばりで獲得したバス技術は革新的衛星技術実証3号機に搭載される 「マルチスペクトルカメラを搭載した陸・海観測超小型衛星計画」である超小型衛星「うみつばめ」に応用されます。
©︎東京工業大学理学院物理学系 谷津研究室


Development
ひばり開発の道のり
東工大松永研究室は世界初のCubeSatであるCUTE-1をはじめとし、常に新しい衛星開発に挑戦しています。 ひばりの始まりは2016年に行われた第24回衛星設計コンテストです。そこで設計大賞を受賞したひばりの原案は 2018年にJAXAの革新的衛星技術実証2号機に採択されました。 10数人の学生を中心に開発された衛星は2021年に打上げ予定です。
NEWS
2021/11/9
ひばりとの通信に成功しました!ダウンリンクとアップリンク共に正常に機能しました。
2021/11/9
2021年11月9日9時55分16秒(日本標準時)イプシロン5号機により、ひばりが打ち上げられました。
2021/11/6
イプシロンロケット5号機によるひばりの打上げ日が2021年11月9日に再設定されました。
2021/10/28
イプシロンロケット5号機によるひばりの打上げ日が2021年11月7日に再設定されました。
2021/10/7
ひばりを搭載したイプシロンロケット5号機の打上げが、上空の風が打上げ時の制約条件を満たさなかったため、延期されました。
2021/10/1
ひばりを搭載したイプシロンロケット5号機の打上げが、地上設備の不具合による緊急停止が行われたため、延期されました。
2021/09/29
東工大ニュース「産学連携でつくるオーロラ観測用紫外線カメラ打ち上げへ」がリリースされました。
2021/09/29
東工大ニュース「可変形状姿勢制御実証衛星「ひばり」を開発」がリリースされました。
2021/09/29
イプシロンロケット5号機による革新的衛星技術実証2号機の打上げ時刻及び打上げ時間帯が公開されました。
2021/04/27
革新的衛星技術実証2号機に採択された超小型衛星ひばりに関するインタビュー記事が公開されました。