電源系
EPS
About
概要
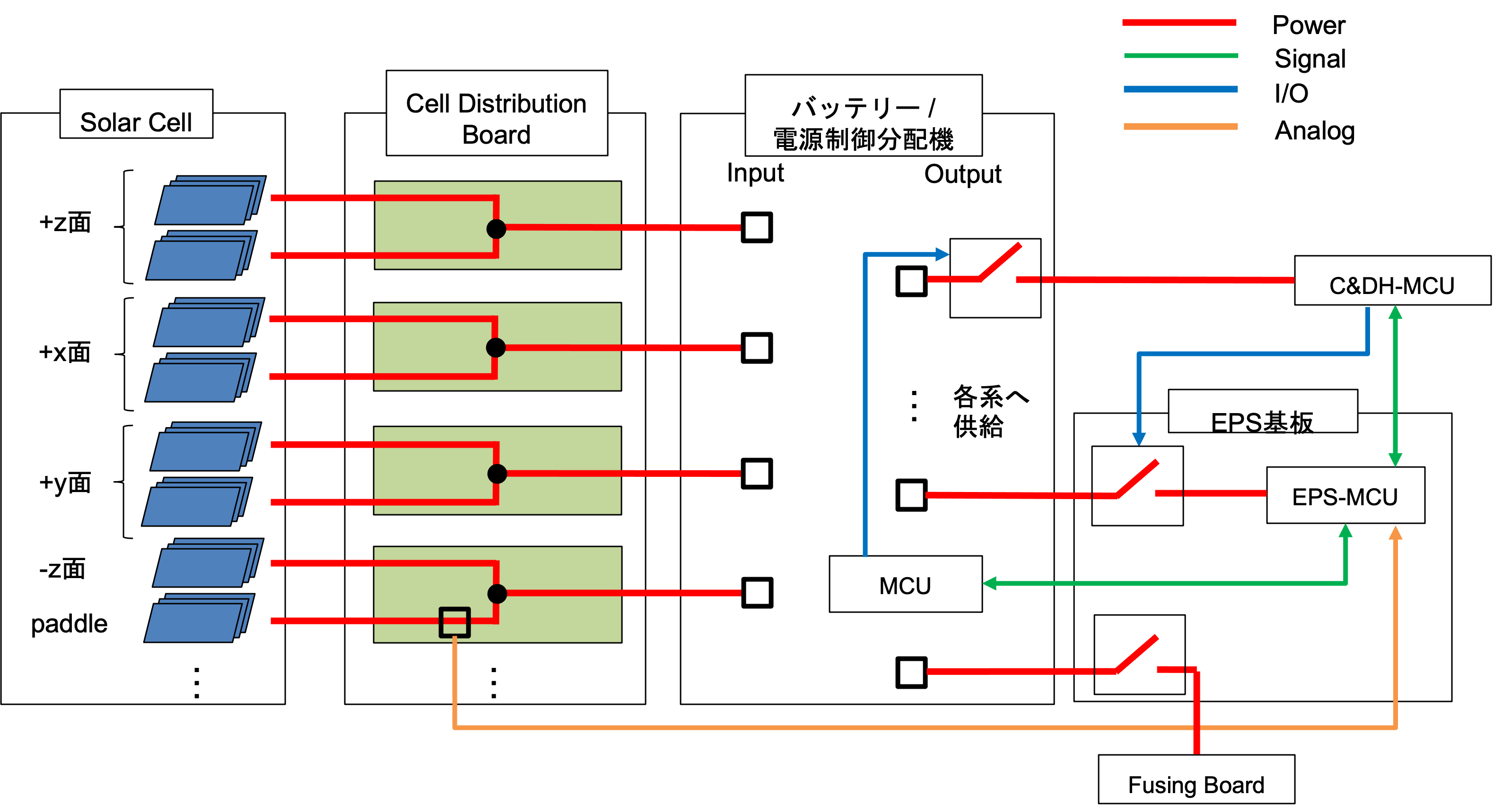
EPS(Elwctric Power System)系は衛星の電源の管理を担うサブシステムです。 日照時は太陽電池セルによる発電によって電力をまかない、日陰時はバッテリーの放電により各系に電力を供給することで、 衛星の電源が枯渇しないようにマネジメントするのが主な仕事です。 ひばりにおけるEPS系の要求は大きく5つあります。
構成図に示すように、太陽電池セルからの発電とバッテリーの充放電を制御しています。 システムおよびミッションからの要求を満たすように、太陽電池セルの最大発生電力は太陽指向時で40.1W、バッテリーは容量161WhのLi-ionバッテリーを選定しています。 また、EPS基板自体に不具合が発生した時にリセットできるように、EPS基板への電源供給ラインのスイッチはC&DH系が握っています。
- 太陽電池セルからの発電により, 衛星全体の必要電力を確保できること
- 各運用モード時に電力が枯渇しないように, 蓄電機能を有すること
- バッテリーの電圧に応じて, 太陽電池セルからの入力電力を制御できること
- 各運用モード間に閾値電圧を設定し, バッテリー電圧に応じてモード遷移が正常にできること
- 放射線による電流異常といった各機器の異常を検知・処理できること
構成図に示すように、太陽電池セルからの発電とバッテリーの充放電を制御しています。 システムおよびミッションからの要求を満たすように、太陽電池セルの最大発生電力は太陽指向時で40.1W、バッテリーは容量161WhのLi-ionバッテリーを選定しています。 また、EPS基板自体に不具合が発生した時にリセットできるように、EPS基板への電源供給ラインのスイッチはC&DH系が握っています。
Solar cell
太陽電池セル
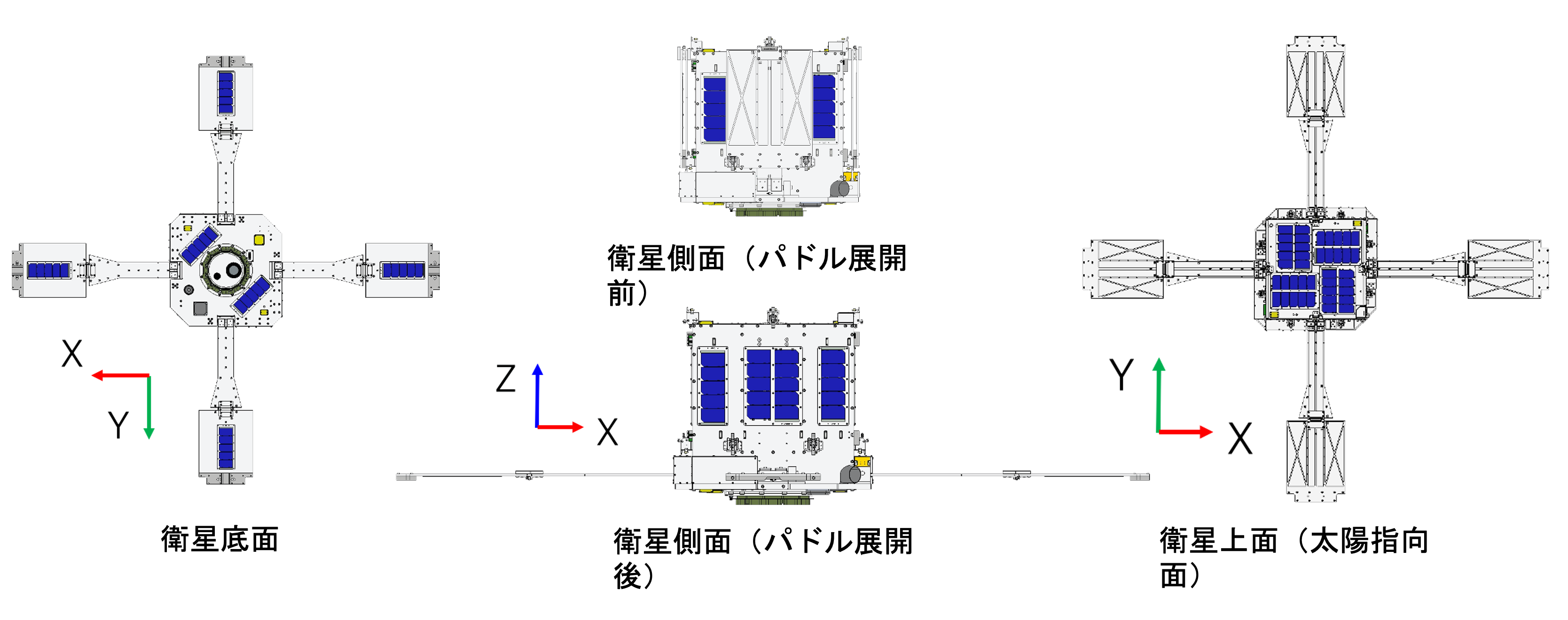
図に示すように、太陽電池セルの搭載方法は、衛星各側面に太陽電池セルを搭載するボディマウント方式を採用しています。 駆動する太陽電池パドルにも太陽電池セルは搭載されていますが、今回は可変形状姿勢制御実証のためのミッション機器という扱いのため、 必要な電力は主に衛星の各側面に搭載したセルから発電するように設計されています。 一方で、太陽電池パドルに搭載したセルからの発電量をモニタすることで、パドルの展開確認と、駆動パドルによる発電の実証を行います。
Simulation
電力シミュレーション
太陽電池セルの配置を見ると、構造上の制約から、衛星の各側面で搭載されているセルの数が異なります。 このため、発生電力は衛星の姿勢に大きく依存することになります。 また、ひばりは可変形状姿勢制御実証のために、太陽電池パドルが駆動するという他の衛星と大きく異なる点があります。 特に図に示すようなパドル展開シーケンスではボディマウントのセルがパドルの陰に入ってしまい、発電量に影響を与えることが予想されます。 そこで、様々な衛星姿勢、衛星形状において電力の収支を計算し電源系設計の妥当性を確認する必要があります。 宇宙環境や軌道・衛星ダイナミクスのシミュレーターであるSiLS(Software in the Loop Simulation)と 乱数を使って条件をランダムに変えた大量のケースでシミュレーションを行うモンテカルロ法を組み合わせて 電力枯渇が発生する確率を求めることにより、電源系設計の妥当性を確認しました。
