To store data from sensors, which are pressure sensor, accelerometer(3 axes), gyroscope(3 axes) and magnetoresistive sensor(3 axes)
into internal EEPROM and transmit them to the ground station.
1.Untill CANSAT being released from carrier, sampling rate of storing data into EEPROM is 50Hz for memorizing detailed data on launching.
After released, the sampling rate is 5Hz for long time memorizing.
2.To compare with two altitute data, which are measured from acceleremeter and pressure sensor.
3.To compare with two attitude data , which are measured from gyroscope and magnetoresistive sensor.
4.Experiment for high speed transmission
Fundamental experiment for attitude control of micro-satellite.
For our future micro-satellite development, Analysis of micro satellite motion which is determined from acceleration and attitude angle.
Research on satellite inner structure.
| |
66mm(diameter) x 123mm(height) Can shape(350ml) | |
| A6063,A5052 | ||
| Total | 367.7g | |
| Can | 7.6g | |
| Structure | 114.8g | |
| Transceiver | 32.1g | |
| Pressure Circuit | 17.9g | |
| Gyroscope Circuit | 17.0g | |
| Magnetoresistive Sensor Circuit | 14.0g | |
| Accelerometer Circuit | 14.0g | |
| OBC Circuit | 19.6g | |
| Memory Circuit | 18.9g | |
| TNC Circuit | 21.6g | |
| Battery (Panasonic CR-P2) | 37.5g(a piece) | |
| Antenna | 15.2g | |
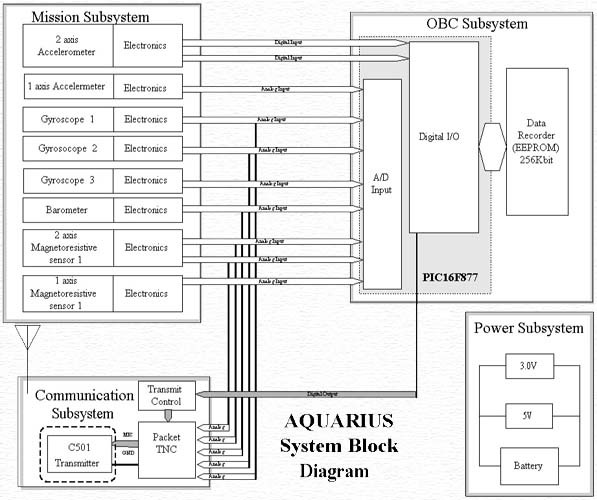
| Pressure
Sensor,Accelerometer(3 axes), Gyroscope(3 axes),Magnetoresistive Sensor(3axes) |
||
| PIC16F877 | ||
| 24LC256 Serial EEPROM 256kbit | ||
| about 1A(max) | ||
| 6.0V 2600mAh(Panasonic CR-P2 Parallel Circuit) | ||
| Packet
Operation (Tokyo Institute of Technology Original Protcol) |
||
| 1200bps | ||
| 300mW (Standard C501) | ||
| 145.8MHz | ||
| Amateur Rocket | ||
| The Blackrock desert, Nevada State, USA | ||
| 7/28/2000 | ||
Turn main switch on before CANSAT being inserted into carrier. (*photo 1)
Main switch being turned on, data of accelerometer starts to be stored on 50Hz sampling rate.
If rocket launch is delayed with some trouble, memory is not filled, for sensor data are overwrittten into memory in this time.
CANSAT being released from carrier, micro switch is turned on, and after about 30 second sampling rate is changed from 50Hz to 5Hz and overwrite is finish too.
After sampling rate is changed, sensor data starts to be transmitted to the ground station with Titech Original Protocol, which is
high-speed rate packet included error-correcting code.
CANSAT being collected, main switch is turned off to stop memorizing and transmitting.
 |
 |
|
Photo
1
(Main Switch) |
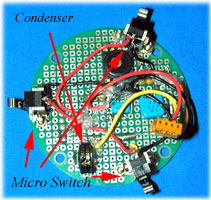
Photo
2
(Micro Switch) |
Success Level 1
To store data of all sensors into memory.
To store data of all sensors into memory and transmit them to the ground station.
To store data of all sensors into memory, transmit them to the ground station and analyze memory data after collecting CANSAT.
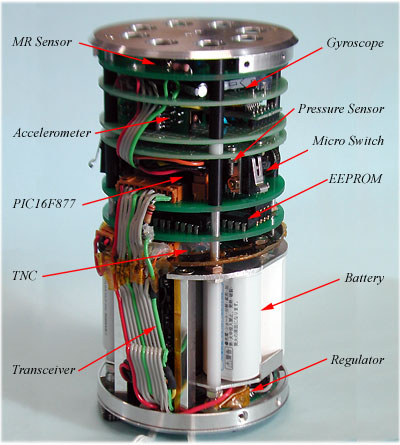
For easy assembly and high density, layer structure design.(*photo 3)
 |
 |
|
Photo
3
(Layer Structure) |
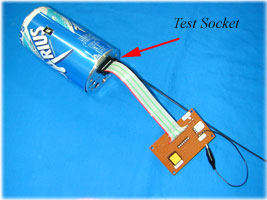
Photo
4
(Test Socket) |
SRTL Director
Prof. Saburo MATUNAGA Matunaga.Saburo@horse.mes.titech.ac.jp
Koji NAKAYA koji@horse.mes.titech.ac.jp
Hideto OKADA eightok@horse.mes.titech.ac.jp
Hideto OKADA eightok@horse.mes.titech.ac.jp
Masafumi IAI miai@mes.titech.ac.jp
Naoki MIYASHITA miyashita@horse.mes.titech.ac.jp
http://horse.mes.titech.ac.jp/srtlssp
Copyright(C) 1999,2000,2001 -CANSAT 2 AQUARIUS- All rights reserved.
Tokyo Institute of Technology
Space Robotics and Teleoperations Laboratory (SRTL)
ARLISS 2000 CANSAT TEAM