圧力、加速度(3軸)、角速度(3軸)、地磁気に対する傾き(3軸)を測定し、内部ROMに書き込む.
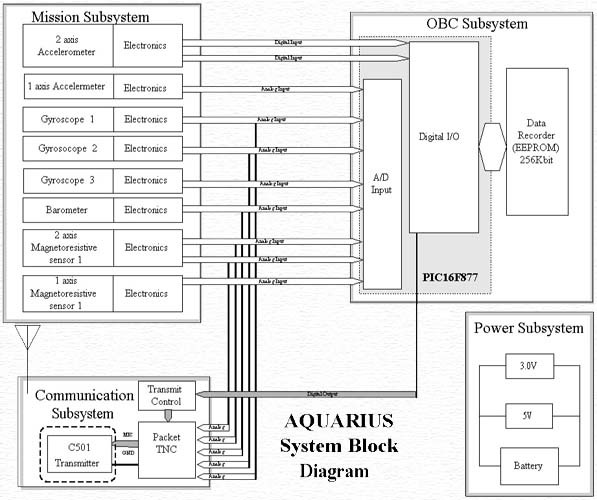
地上局には、TNCの性能が7チャネルであるため、ジャイロ3軸、地磁気センサ3軸および圧力センサの測定値を送信する.
打上時の正確な加速度を得るため、サンプリング・レートを高めにとる.
昨年の経験より、打ち上げに時間がかかる場合を考え、キャリア放出までは上書きを繰り返しておく.
1.打ち上げ時の打ち上げ方向1軸加速度センサデータを50Hzでとる. 放出後はすべてのセンサについて5Hzでサンプリング.
2.加速度センサによる加速度データから高度を求め、圧力センサによる圧力データ(高度データに変換可能)から得られる高度と比較する.
3.ジャイロデータから得られる角速度データから,姿勢角を求め,これと地磁気センサから得られる姿勢角データと比較する.
4.高速通信
小型衛星の姿勢情報取得に関する基礎実験
加速度、姿勢角などから、小型衛星の運動を解析し、今後の小型衛星開発に必要なデータを取得する.
内部構造を簡素化することで、今後の小型衛星に役立つ構造を研究する.
| |
直径66mm X 高さ123mm 缶サイズ(350ml) | |
| A6063,A5052 | ||
| 全体 | 367.7g | |
| 缶 | 7.6g | |
| 構体 | 114.8g | |
| 通信機 | 32.1g | |
| 圧力センサ系基板 | 17.9g | |
| ジャイロスコープ系基板 | 17.0g | |
| MRセンサー系基板 | 14.0g | |
| 加速度センサ系基板 | 14.0g | |
| OBC系基板 | 19.6g | |
| メモリ系基板 | 18.9g | |
| TNC系基板 | 21.6g | |
| 電池(CR-P2) | 37.5g(1個) | |
| アンテナ | 15.2g | |
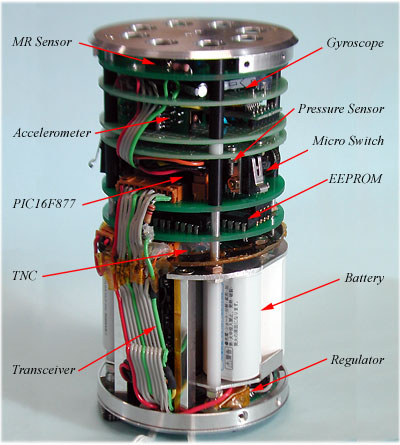
| 圧力センサ,加速度センサ(3軸), ジャイロスコープ(3軸),地磁気センサー(3軸) |
||
| PIC16F877 | ||
| 24LC256 Serial EEPROM 256kbit | ||
| 約1A(max) | ||
| 6.0V 2600mAh(Panasonic CR-P2 2個) | ||
| パケット通信(東工大無線研オリジナルプロトコル) | ||
| 1200bps | ||
| 300mW (Standard C501) | ||
| 145.8MHz | ||
| アマチュアロケット | ||
| アメリカ合衆国 ネバダ州 ブラックロック砂漠 | ||
| 2000年7月28日 | ||
ロケット搭載前にCANSAT 2背面のメインスイッチを入れる.(*写真1)
メインスイッチを入れることで,加速度センサが50Hzの高サンプリングレートで記録を開始.
この間,加速度センサーデータをメモリに上書きを繰り返すため,ロケット搭載から打ち上
げ時間まで 時間が掛かっても対応できる.
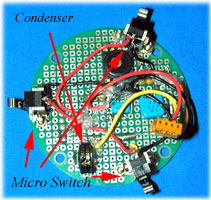
キャリアからCANSAT 2が放出されると,マイクロスイッチ(*写真2)が解放され,約30秒後に
上書きを繰り返していたデータ記録を違うメモリに移行し,サンプリングレートを5Hzに変える.
サンプリングレートが5Hzに変化したところで,加速度以外のセンサのデータ取得を開始する.
また,各センサデータをエラー訂正符号を含んだオリジナルプロトコルによるTNCで地上局に
高速送信する.
回収後メインスイッチを切り,メモリ記録,地上局送信を停止させる.
 |
 |
|
写真1
(メインスイッチ) |
写真2
(キャリア放出検出用マイクロスイッチ) |
Success Level 1
全センサの測定値をメモリに書き込む.
全センサの測定値をメモリに書き込み,一部を地上局に送信する.
全センサの測定値をメモリに書き込み,一部を地上局に送信する.また、缶を回収しメモリデータを読み込み解析する.
各センサ,OBC,メモリ,TNCを円形基板状にして層状に組み立てる事により,集積度を上げ,組み立て・分解が容易になるように設計(*写真3)
 |
 |
|
写真3
(層状構造) |
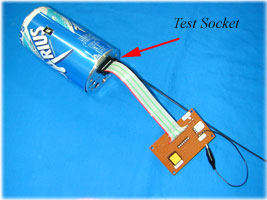
写真4
(テスト用ソケット) |
SRTL Director
Prof. Saburo MATUNAGA Matunaga.Saburo@horse.mes.titech.ac.jp
Koji NAKAYA koji@horse.mes.titech.ac.jp
Hideto OKADA eightok@horse.mes.titech.ac.jp
Hideto OKADA eightok@horse.mes.titech.ac.jp
Masafumi IAI miai@mes.titech.ac.jp
Naoki MIYASHITA miyashita@horse.mes.titech.ac.jp
http://horse.mes.titech.ac.jp/srtl
Copyright(C) 1999,2000,2001 -CANSAT 2 AQUARIUS- All rights reserved.
Tokyo Institute of Technology
Space Robotics and Teleoperations Laboratory (SRTL)
ARLISS 2000 CANSAT TEAM