 |
 |
 Mission概要
Mission概要東京工業大学CanSat1号機のミッション内容は地上からのコマンドを受信し, CCDカメラを任意方向に回転させ,CCDカメラの映像を地上に送信する. CCDカメラの回転角はポテンショメータによって測定し,回転角データは CanSatに搭載したメモリに保存する.
実験結果東京工業大学CanSat1号機はARLISS初日の7月28日に打ち上げられたが 幾つかのトラブルの為にCCDカメラの映像およびポテンショメータのデータ を取得することが出来なかった. トラブルとは以下に示す通りである. (1)メモリを逆に挿してしまった為に,データをメモリに書き込めなかった (2)通信機(DJ-C1)の*オートパワーオフ機能によって通信機の電源がOFFになってしまい,DTMFコマンドを受信 することが出来なかった (3)内部配線の接触不良の為に画像送信機が機能しなかった *オートパワーオフ機能:通信機が1時間以上電波を 送受信しないと自動的に電源をOFFにする機能 7月26日にスタンフォード大学で最終調整を行った際には正常に作動しており, このとき得られた実験データを以下に示す  スタンフォード大学での最終調整の様子 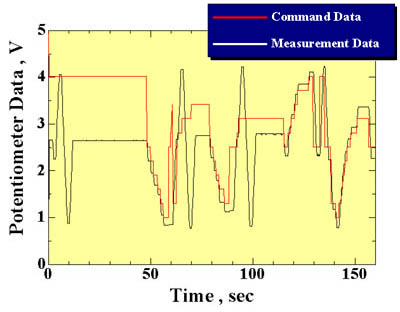
 左のグラフでポテンショメータの値がスタート直後に±2V変動しているのは,プログラム によってCCDカメラを自動的に回転させているためである. その後,50秒あたりから指令値に追従しているのが分かる. 60秒~100秒あたりで測定値が変動しているのは,電源リセットがかかった為にプログラムが最初から スタートしてしまい,自動的にカメラが回転しているからである. 指令値に対する追従性を詳しく見るために110秒~160秒のデータを拡大して次に示す. 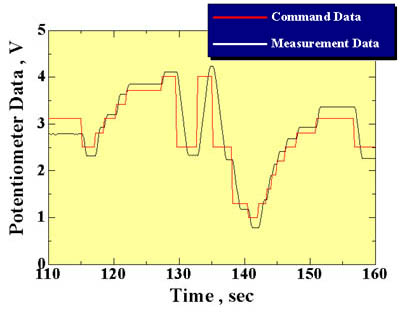
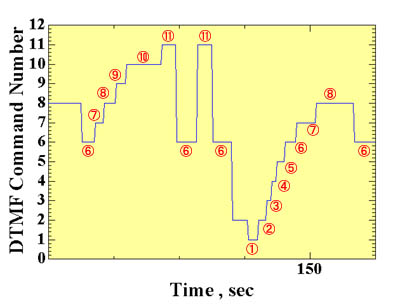
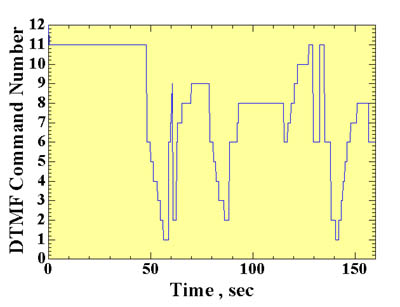
ここで,DTMFコマンド番号(1~11)とCCDカメラ回転角の関係は下図に示す通りである. 
|
|
|
 |
Copyright(C)
1999,2000,2001 -CANSAT 1 C4-Sat- All rights reserved. Tokyo Institute of Technology Space Robotics and Teleoperations Laboratory (SRTL) ARLISS 2000 CANSAT TEAM Contact : Hirotaka SAWADA |