Top ![]() Subsystems
Subsystems ![]() ADCS
ADCS
Attitude Determination & Control System has the function of the
calculation where the satellite points (attitude estimation) ,
pointing where the satellite should be point and
damping of angular velocity (attitude control), and so on.
As attitude determination, using gyro sensor, magnetic sensor and sun sensor
PDA calculates the attitude of the satellite.
Also at the ground station PC simulator calculates the attitude using sensor data from the satellite
and the results are compared.
As attitude control, we use magnetic torquers as the control device and make the satellite
spun up and damped its angular velocity.
We explain about ADCS of Cute-1.7 + APD II as follows.


There is a DAQ system which becomes important in attitude determination and control system.
Main CPU of this satellite is PDA, but PDA has only USB interface,
so it is not possible to handle AD conversion and DIO port operation and PWM operation etc.
Then, we developed DAQ system as the complementary USB1.1 device of PDA.
The main processor is formed with H8S/2328F. So this system sends data to PDA
which is converted from digital signal(control the direction of magnetic torquer),
analog value(electric current sensor and gyro sensor data etc) and
PWM signal(control the strength of magnetic torquer) etc.
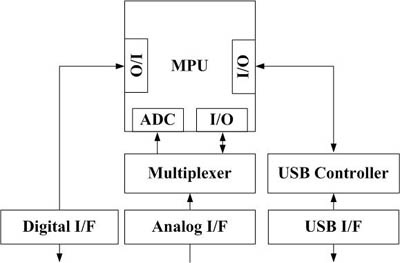
DAQ System Block Diagram
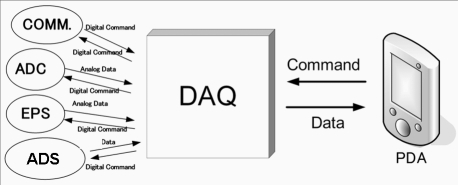
System around DAQ
Copyright ©, Tokyo Institute of Technology, All Rights Reserved.
![]()
![]()
![]()