
姿勢制御系(Attitude Control System)とは,時々刻々と変化する人工衛星の姿勢を,
- ミッション内容に応じて所望の方向へと変更する
- 目標とする姿勢を安定に維持する
- 衛星の姿勢を高速で変更させる.
TSUBAMEでは,「ガンマ線バーストを観測する」というミッションに挑戦しますが,このガンマ線バーストには,「宇宙のどの方向で発生するかわからない」,「観測可能な時間が数秒から数十秒と非常に短い」という特徴があります.そのため,バーストが発生すると同時に,発生位置を特定し,バーストの方向に観測器をすばやく向けることが求められます.この「高速姿勢変更」実現のカギを握るのが,Control Moment Gyro (CMG) と呼ばれる姿勢制御用のアクチュエータです.CMGは従来の小型衛星で用いられてきた姿勢制御機器に比べ,非常に大きなトルクを発生できるという特長があります.TSUBAMEでは,このCMGを超小型衛星用に改良した「小型CMG」を用いて,バーストの発生方向にいち早く観測器を向けるように,衛星の姿勢を制御します.
- 撮影の際に衛星を静止させる
軌道上で鮮明な地上の画像を撮影するためには,「カメラを支える衛星の姿勢がぶれない」ことが必要です.そのため,地上の画像を取得する際には,衛星の姿勢を安定させなければなりません.TSUBAMEでは,分解能14mの画像を取得するために,0.5 deg/sec 以下の姿勢安定度(衛星の姿勢が1秒間に 0.3 deg 以上ぶれないこと)と0.72 deg の指向精度が求められています.
- 太陽パドルを太陽の方向に向け続ける
TSUBAMEでは,太陽パドルに張られた太陽電池を効果的に使用するために,太陽パドルを常に太陽の方向に向け続けるような姿勢制御を行います.この役割を果たす機器が,磁気トルカと呼ばれる姿勢制御装置です.松永研究室が開発したCute-1.7 + APDⅡ(2008年4月打ち上げ)では,この磁気トルカを用いた能動的姿勢制御に挑戦してきました.TSUBAMEでは,これらの技術を継承し,磁気トルカを用いて太陽電池パドルを常時太陽指向させるような姿勢制御を実現します.
TSUBAME姿勢制御系の概略を以下に示します.
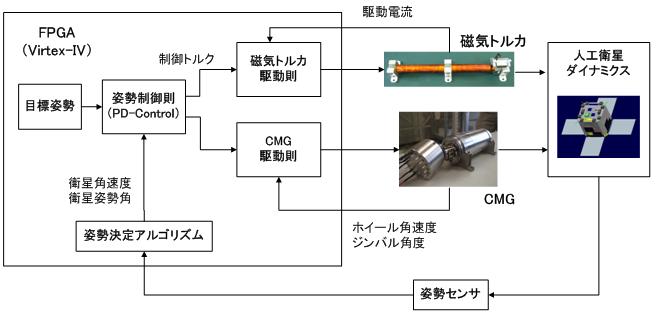
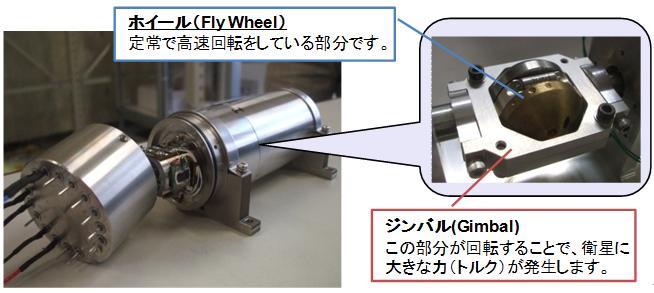
姿勢制御用の小型CMGは,多摩川精機と共同で研究開発を行っています.この小型CMGの特徴としては,ホイールとジンバル,そして角度センサが1つの円柱状の構体内に密閉されて収納してあることが挙げられます.構体を含めた1 ユニットの質量は約1kgで,超小型衛星に搭載できるように最大限の小型・軽量化が図られています.
磁気トルカとは,コイルに電流を流すことで磁界を発生させ,地球の磁場との相互作用を利用することでトルクを発生させる人工衛星の姿勢制御装置です.モータを使用する必要がなく小型・軽量であるため,超小型衛星の姿勢制御によく用いられます.TSUBAMEでは,比較的強い磁場を発生させることが可能な,ロッド型の磁気トルカを使用しています.
