
人工衛星は基本的に全ての電源供給を太陽エネルギーに依存しています.そのため,人工衛星は太陽光のエネルギーを太陽電池セルによって電力に変換し,各系に供給するシステムを搭載することが必要になります.一方で,太陽の光が当たらない日陰時には太陽エネルギーが得られないため,日照時に2次電池(バッテリー)に電力を溜めておき,必要電力を取り出すというシステムも搭載する必要があります.これら,衛星にとって最も根源的で重要なエネルギーマネジメントシステムを,設計から製作まで担当するのが電源系サブシステムの役割です.例えば,衛星消費電力の管理,太陽電池セルの必要枚数の算出,バッテリー容量の決定,電源電圧の決定,電源安定化方式の決定といったシステム設計や,最適な電源回路やバッテリアセンブリの設計・製作といった機器設計およびものづくりも電源系は幅広く手掛けています.
TSUBAMEは小型衛星に分類されてはいますが,ミッション時には大電力を必要とするCMG・理学系観測機器が動作するので,約80Wの電力消費があります.この値は,以前JAXAが開発した50kg級衛星μLabsatを上回っており,100kg級のSDS-1に匹敵するほどです.この大消費電力に対応するため,TSUBAMEでは太陽電池パドルの展開によって発電面積を増加させる方式を採用しました.この方式は,振動特性,信頼性などの点でリスクを伴いますが,電力発生量の確保のためには不可欠な選択であったと考えています.また,運用フェーズにおける電力消費を詳細に検証しながらも,小型かつ大学主導開発の衛星であるというTSUBAMEの位置づけを考慮に入れて,過大なマージンを持たせないことを電力収支の管理指針としています.
電源系の構成を以下のシステム図に示します.太陽電池はシリーズレギュレータを介して電源バスに接続され,バッテリーは電源バスに直結されています.そのため,電源バスの電圧は日照時や日陰時など太陽電池の電力の発生状況やバッテリーの使用状況等に応じて変化します.バス電圧は19.8V~31V程度の間での変動が予想されており,TSUBAMEの電源バスは非安定化バスということができます.
衛星内の各コンポーネントは様々な電源電圧を必要としていますが,TSUBAMEではこれらの電圧を生み出す回路を分散配置しています.すなわち,TSUBAMEでは各サブシステムが,共通の電源バスを引き込み,サブシステム内に搭載したDCDCコンバータを使用して,所望の電源電圧を得るという方式を採用しています.これによって,配線質量の軽減や,送電ロスの低減を図っています.
電源バスは非安定化バスであるため,電力供給が過剰な場合や,衛星が日陰から日照に移る間などに,太陽電池の出力電圧が大幅に上昇する可能性があります.そのため,バス電圧を31V以下に抑えるシリーズレギュレータを搭載しています.このシリーズレギュレータは,従来の衛星でよく用いられるシャント方式とは異なり,太陽電池の動作点を固定しないため,余剰電力の排熱を比較的小さくできます.
TSUBAMEはこれまでの松永研究室の衛星に比べて扱う電力量が際立って大きいため,太陽電池とバッテリーを多数搭載し,それぞれ,多並他直列に接続して電力要求に応える設計となっています.
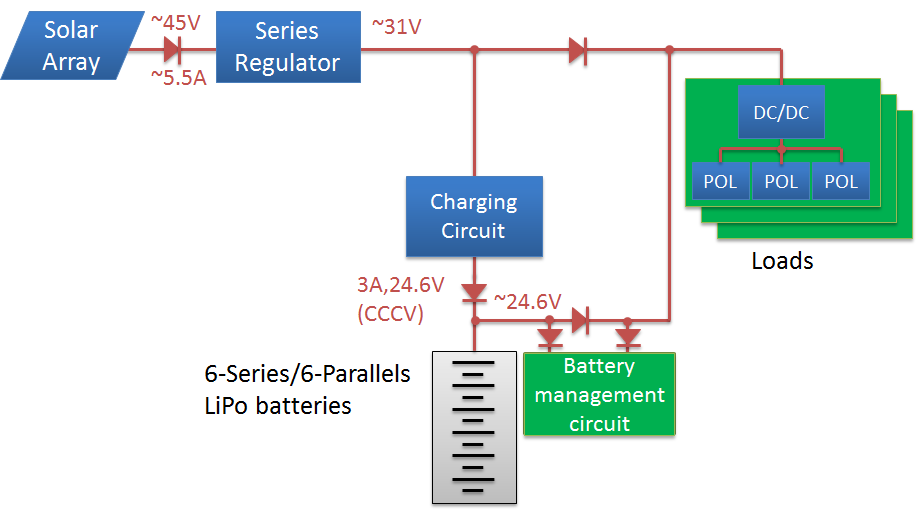
電源系システム図