
C&DH系はTSUBAME内部のバスの構成と,地上と衛星間の間で行われるコマンドの決定とバスに流れるメッセージの決定を行います.
今までのCUTEでは内部のバスはUSBや1-wireを用いた”シングルマスタ”方式であり,マスタとなるコンピュータが全てのスレーブを管理していました.しかし,この方法は拡張性が低く大規模な開発に適していないため,TSUBAME開発では”マルチマスタ”方式を採用することにしました.この方式を用いることにより,機能別のモジュール開発をそれぞれが行い,最後にそれをバスに接続できます.また,なるべく汎用的なモジュールを作り,今後の衛星開発への負担を減らす狙いもあります.
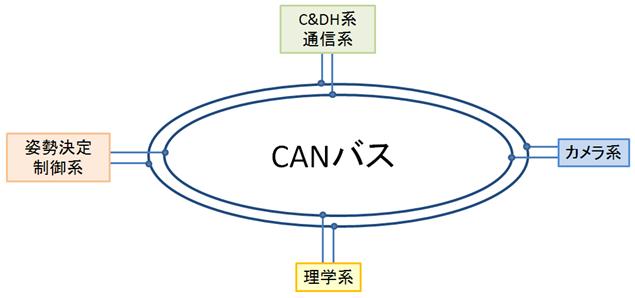
バス
TSUBAMEで用いるバスでは,自動車の車内LANとして普及している”CAN(Control Area Network)”通信を用います.また,TSUBAMEのモジュールは大きく5つに分かれています.カメラモジュール,電源モジュール,姿勢系モジュール,通信モジュール,理学系モジュールがあり, 電源モジュール以外はCANバスに接続されています.
TSUBAMEのオンボードコンピュータとして高速演算用に”Virtex-4”を用いる予定です.また,通信系のMPUとしてはCuteで実績のあるH8シリーズを用いる予定です.
TSUBAMEに用いるOBCとCAN用のICの宇宙での耐性を確認するためにOBCコンペティションに参加しました.
詳細を載せたブログを公開していますのでこちらをご覧ください-->東工大UOBC