
姿勢決定系(Attitude Determination System,ADS)は,TSUBAMEが地球周回軌道上においてどの位置にいるか,どの方向を向いているのか,そしてどのような運動をしているのかを決定します.
TSUBAMEの各ミッションを達成するために,姿勢決定系は次のような仕事を担当します.
- GRB観測ミッションにおいて,太陽センサ・磁気センサ・ジャイロセンサ・GPSRを用いて姿勢運動を推定し,慣性座標系に対するGRB発生方向を決定します.
- 能動的指向撮影ミッション,多点連続撮影ミッションの際に,各センサから得られるデータより地心測地座標系に対するTSUBAMEの姿勢運動を推定し,得られた推定値を姿勢制御系に送ります.
- 定常運用時において,太陽指向制御のために,太陽センサを用いてTSUBAMEからの太陽方向を推定します.
各センサは姿勢制御系と同じFPGAで統合され,データ取得されます.それと同時に各モデルから参照ベクトルが計算され,取得データ,参照ベクトルおよび姿勢決定アルゴリズムを用いて衛星姿勢の検出が行われます.
現在姿勢決定系として考えられているシステムをまとめると以下の通りとなります.
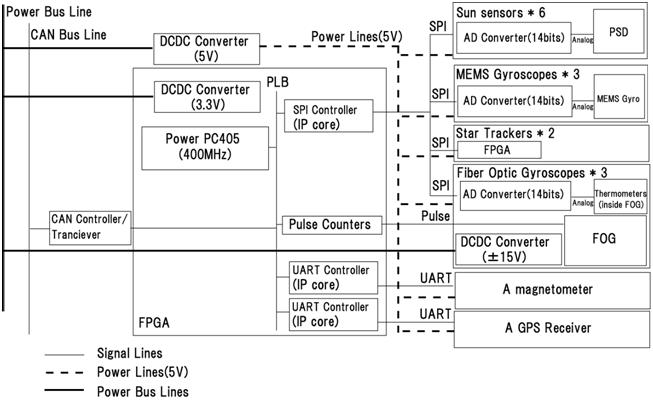
センサの精度が高いほどより精度の高い姿勢決定が可能ですが,一般に精度が高いほど消費電力が大きくなる傾向にあります.TSUBAMEでは運用モードによって使用する姿勢決定センサを切り替えることを想定しており,消費電力の小さいセンサである,太陽センサ・磁気センサ・MEMSジャイロからなる粗姿勢決定システムを定常運用の太陽指向制御時に,また高い姿勢決定精度を求められる各ミッション時においてはスタートラッカと光ファイバジャイロからなる精姿勢決定システムを用いて,それぞれ衛星姿勢の決定を行います.
磁気センサは地球磁場の方向と大きさを検出するセンサです.地磁気方向ベクトルは地球に対する衛星の位置によって異なり,地球磁場モデルを用いて衛星位置座標と時刻から地磁気参照ベクトルを求めることができます.こうして計算された参照ベクトルと,センサによって検出された地磁気ベクトルを比較することで,衛星の姿勢角を推定します.
ジャイロは,角速度を検出するためのセンサで,TSUBAMEではMEMS技術を利用したシリコンリングを内部にもつ振動ジャイロを搭載します.このシリコンリングはMEMSジャイロ内で振動しており,この状態で回転運動するとシリコンリングにコリオリ力が加わりその振動モードが変わるので,この様子を検出することで角速度を取得することができます.
スタートラッカは,恒星を検出しセンサ座標系における恒星の方向ベクトルを測定するセンサです.スタートラッカは通常,光学レンズ系とエレキ部からなり,光学レンズ系で集光された光を焦点距離に配置したイメージセンサに結像させることで検出します.このようにして得られえた星方向データと,予め記録した恒星カタログとを比較することで衛星の検出を行います.
光ファイバジャイロは,相対性理論より導出されるサニャック効果を基本原理とするもので,回転運動により光ファイバループの左右伝播光の間に生ずる位相差を,光の干渉原理を利用して検出するものです.非常に高い精度での角速度検出が可能であるため,ミッション時の高い姿勢安定度要求を達成するために搭載されます.
GPS衛星から電波を受信し,その情報を基に衛星の位置検出および軌道決定を行います.また,正確な時刻情報についても取得します.TSUBAMEでは,車載用GPS受信機を基にし,超小型の車載用GPS受信機の利点を生かしつつ衛星に搭載できるよう改良したGPS受信機を搭載予定です.