姿勢決定・制御(Attitude Determination & Control Subsystem)系は
人工衛星が、軌道上でどのような方向を向いているか計算(姿勢決定)し、
人工衛星を好きな方向に向けたり、回転をおさえたりする(姿勢制御)役割を担っています。
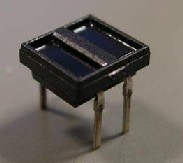
姿勢決定では、ジャイロセンサー、磁気センサー、太陽センサーを用いて、
リアルタイムで計算します。そして、地上でも、送られたセンサーデータから計算を行い、
比較検証します。
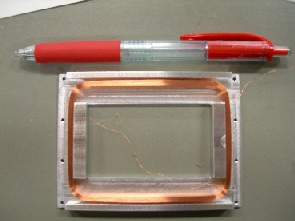
また、姿勢制御では、制御デバイスとして磁気トルカを用い、衛星のスピン(回転)のアップや、
ダンピングを行います。
以下において、ADCS系について、簡単に紹介します。


DAQはPDAとUSB経由で接続され,ジャイロや磁気センサ,電源電圧・電流,磁気トルカ電流等のアナログデータの取得と,
電源ON/OFF,リセット信号,磁気トルカ出力等のデジタルデータの入出力を行います.
機器の構成は下に示す通りで,RAM:256Kbyte,FlashROM:8Kbyte,Freq:25MHzのCISC型MPUを使用しています.
DI/Oが17ch,Analogデータはマルチプレクサを介して72chを外部I/Fとして利用できます.
また,USB Controllerを介してUSBI/Fを備え,PDAに接続することが出来ます.
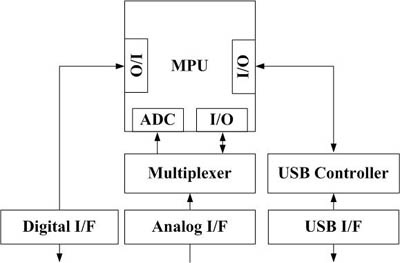
DAQ System Block Diagram
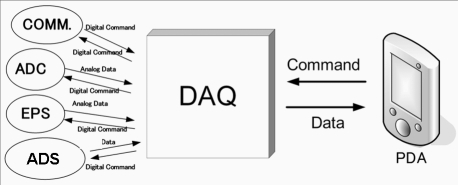
System around DAQ
Copyright ©, Tokyo Institute of Technology, All Rights Reserved.
![]()
![]()
![]()